Sounderkennung mit Hilfe des Mojo V3 FPGA Boards und dem Sound#
Einleitung#
Diese Projektarbeit beschäftigt sich mit der Evaluation des Sound Erkennungs Tutorials der Webiste Alchitry.
In diesem Tutorial nutzt Alchitry ihr eigens entwickeltes Mojo V3 Board (XILINX SPARTAN FPGA) und Soundshield mit sieben Mikrofonen, um Audioquelle zu lokalisieren.
Das Mojo V3 Board ist ein Board, dass für das Erlernen der Erstellung von digitalen Schaltungen mit Hilfe von Field-Programmable-Gate-Arrays (FPGA) genutzt werden kann. Wie man bereits am Namen erkennen kann, bietet ein FPGA die Möglichkeit es jederzeit neu zu beschreiben (Field-Programmable). Dabei wird die Hardware mit Hilfe einer Hardwarebeschreibungssprache (HDL) wie VHDL, Verilog oder wie im vorliegenden Projekt mit Lucid beschrieben. Die Hardware nimmt entsprechend der Beschreibung exakt die Funktion an, die mit der Logik der Beschreibung intendiert ist. Die Beschreibungssprache bewirkt, dass Logikgatter innerhalb des FPGA’s entsprechend der Funktion miteinander verknüpft werden. So kann der Mojo V3 genutzt werden, um einen LED Ring anzusteuern und entsprechend die Richtung anzuzeigen aus der ein Ton erkannt worden ist.
Im Folgenden wird die Hardware beschrieben und danach die Einrichtung der Toolchain Schritt für Schritt erklärt. Außerdem wird der allgemeine Aufbau eines Hardware(FPGA)-Projektes erläutert; im Speziellen das Besipielprojekt Sound Locator vom Mojo V3 Tutorial. In diesem Zusammenhang werden die so genannten IP-Cores erläutert, da Hardware und Software erfahrungsgemäß selten so funkionieren wie es der Entwickler vorgesehen hat, wird außerdem auf Probleme eingangen und wie diese behoben werden können. Hiernach wird eine Übersicht über den Signalfluss gegeben, ausgehend von der Tonquelle, über die Aufnahme bis hin zur visuellen Darstellung. Für ein besseres Verständnis der Signalanalyse und Signalwandlung, wird noch einmal auf die Darstellung von Signalen im Zeit- und Frequenzbereich eingegangen. Außerdem wird der prinzipielle Aufbau der verwendeten Mikrofone beschrieben. Als letztes wird noch die Puls-Dichte-Modulation (PDM) erklärt, bevor es im letzten Teil dieser Arbeit um den Funktionstest und ein Testen der Grenzen der Sounderkennung geht.
Der Mojo Baby#
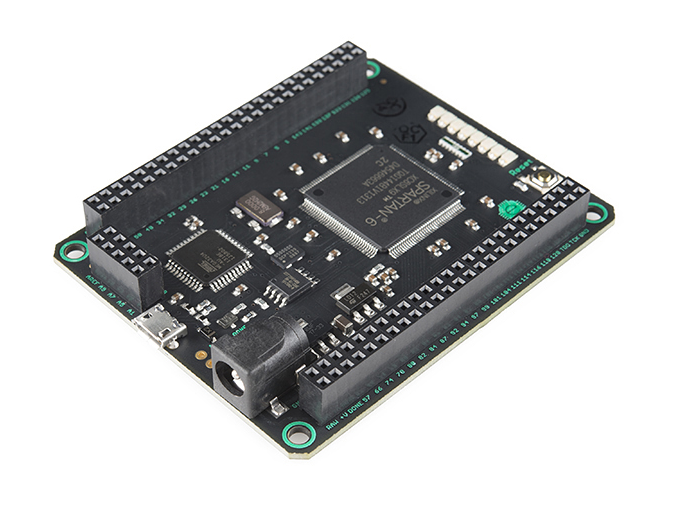
Fig. 1 Das Mojo Entwicklungsboard [Sparkfun, n.d.]#
Das Mojo V3 Board, zu erkennen in Abbildung 1, ist ein preiswertes (~70€, bei AliExpress stand: Juni 2022) FPGA Entwicklungsboard auf dem ein Spartan 6 FPGA eingebaut ist, sowie ein ATmega32 Mikrocontroller, der Arduino kompatibel ist. Dieser wird im Wesentlichen für die Programmierung des FPGA genutzt. Nach der Programmierung wechselt der ATmega32 vom aktiven Modus in den slave Modus und das FPGA kann über den Mikrocontroller auf den seriellen Port, analoge Eingänge und andere Funktionen des Mikrocontrollers zugreifen. Außerdem verfügt das Board über 84 digitale I/O, die über die Steckleisten herausgeführt sind und 8 LEDs, die für allgemeine Programmierung genutzt werden können [Sparkfun, n.d.].
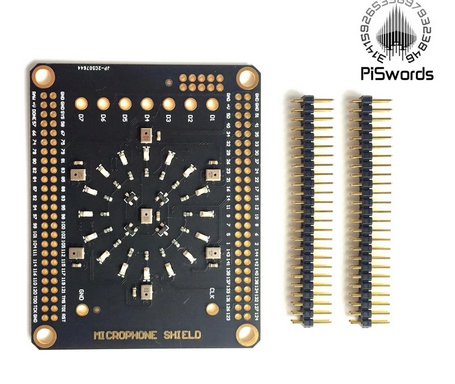
Fig. 2 Das Microphone Shield [aliexpress, n.d.]#
Auf dem Microphone Shield in Abbildung 2 befinden sich sechs konzentrisch angeordnete Mikrofone, die um ein siebtes Mikrofon in der Mitte herum auf dem Shield angebracht sind. Die Anschlüsse dieser Mikrofone sind über Stiftleisten an der Unterseite des Boards herausgeführt und sind kompatibel zu den Steckleisten des Mojo Boards, wodurch dieses auf das Mojo Board aufgesteckt werden kann.
Genutzte Toolchain#
Um eine Hardware beschreiben zu können bedarf es einer Toolchain, die es möglich macht Hardware zu flashen. Die Toolchain für die Inbetriebnahme des Mojo V3 Boards besteht aus einem Projektierungstool Alchitry Labs und einem Builder.
Für das Mojo V3 board bedarf es das ISE WebPack von Xilinx.
Alchitry Labs wird hierbei genutzt, um das Projekt zu organisieren und die unterschiedlichen Teile des Projektes zu erstellen. Der Builder ISE WebPack übersetzt letzten Endes die Beschreibung aus den unterschiedlichen Bestandteilen des Projektierungstools in die eigentliche Logik innerhalb des FPGAs.
Das genutzte Betriebssystem in diesem Projekt ist Linux Debian 11. Im folgenden Abschnitt wird die Einrichtung der Toolchain ausführlich beschrieben.
Installation des ISE WebPack#
Vor der Installation von Alchitry Labs ist es ratsam, zunächst das ISE WebPack zu installieren. Auch eine Überprüfung der Partitionierung des Rechners und des freien Festplattenspeicher ist ratsam, da das Archiv das aus dem Internet geladen wird bereits 6,5 GB groß ist. Für die Installation benötigt das ISE WebPack weitere 18 GB Speicherplatz. Nachdem sichergestellt wurde, dass ausreichend Speicherplatz für die Installation vorhanden ist kann das Installationsverzeichnis von der Website heruntergeladen werden. Hier wird die die Version 14.7 ausgewählt. Unter diesem Punkt wird die ISE Design Suite - 14.7 Full Product ausgewählt und heruntergeladen. Es muss an dieser Stelle erwähnt werden, dass ein Nutzeraccount benötigt wird, um diese Software herunter zu laden und zu installieren.
Nach dem Download geht es weiter zur eigentlichen Installation. Als erstes wird das Installationsverzeichnis entpackt. Mit Hilfe des Terminals und des Befehls cd (change directory) wird in das Verzeichnis gewechselt in dem das heruntergeladene Verzeichnis gespeichert ist.
(Hier: Downloads):
- Terminalausgabe
mojo@fpga:~$ cd Downloads/
Im Verzeichnis wird das Archiv als nächstes entpackt.:
- Terminalausgabe
mojo@fpga:/Downloads/$ tar -xvf Xilinx_ISE_DS_Lin_14.7_1015_1.tar
Die Optionen xvf beschreiben, dass das Archiv entpackt werden soll (x), dass die verarbeiteten Dateien ausführlich aufeglistet werden (v) und dass das Archiv aus dem aktuellen Verzeichnis genommen werden soll (f) [Zibis, n.d.]. Nach diesen Vorarbeiten kann das Setup des Programmes gestartet werden.
Note
Die Installation des ISE WebPacks sollte nach Möglichkeit mit Administrationsrechten ausgeführt werden. Das erleichtert im weiteren Verlauf die Nutzung mit der weiteren Toolchain.
Die Installation kann mit dem folgenden Befehl gestartet werden:
- Terminalausgabe
mojo@fpga:/Downloads/Xilinx_ISE_DS_Lin_14.7_1015_1$ sudo ./xsetup
In Abbildung 3 sind die Geschäftsbedingungen aufgeführt, denen während der Installation zugestimmt werden müssen.
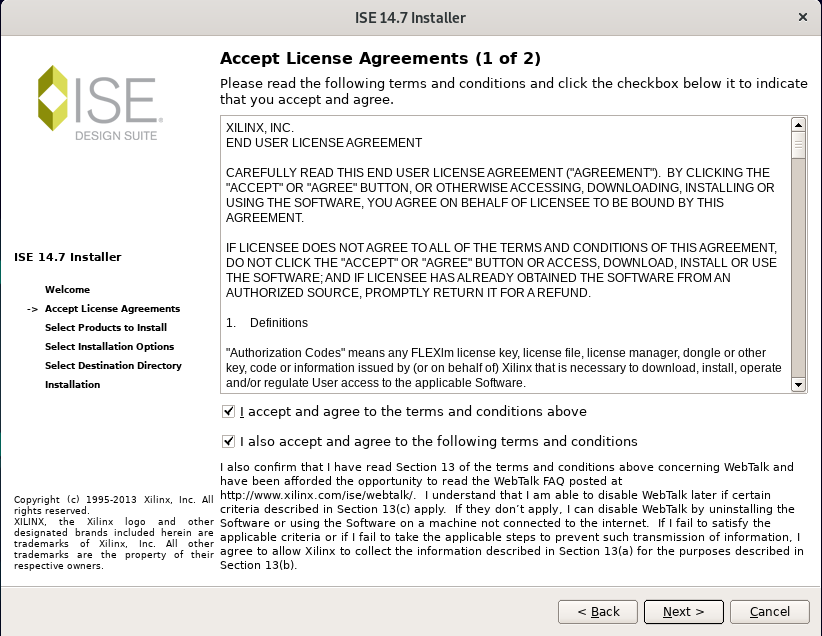
Fig. 3 Zustimmung zu den Terms and Conditions geben#
Nach der Zustimmung wird in Abbildung 4 gezeigt, welches Produkt für die Installation ausgewählt werden muss.
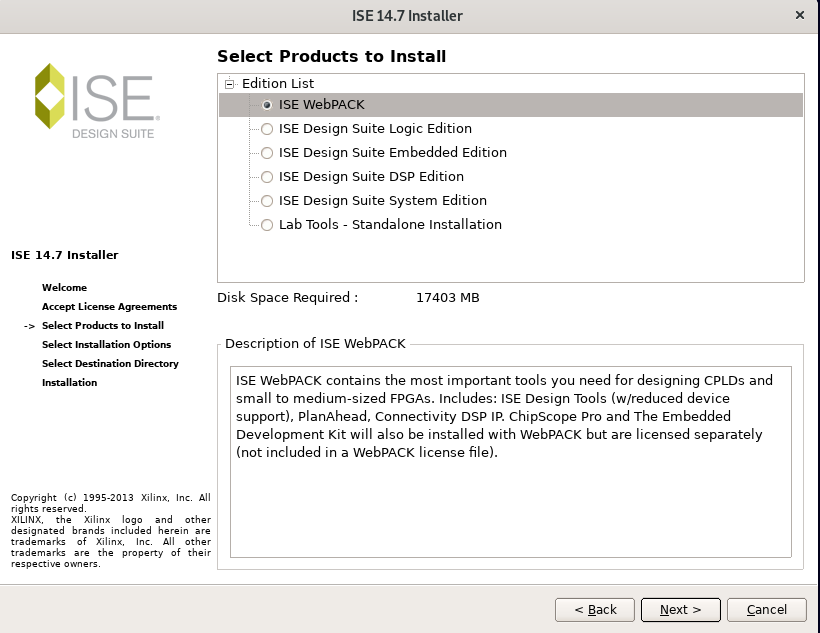
Fig. 4 Auswahl des ISE WebPACKs für die Installation#
Im Folgefenster werden alle Haken gelassen wie der Installationswizard es vorschlägt. Eine Nutzung mehrer CPU-Kerne ist sinnvoll, um die Installationszeit zu verringern.
Während der Installation kann die Zeit genutzt werden, um eine entsprechende Lizenz auf Xlilinx zu erstehen. Nach Eingabe der persönlichen Daten wird die Lizenz für das ISE WebPack ausgewählt und die Lizenzdatei kann heruntergeladen und dem Programm hinzugefügt werden.
Beim erstmaligen Start öffnet sich zunächst der Lizenzmanager, der noch einmal auf das Erlangen der Lizenz hingeweist wie in Abbildung 5 dargestellt.
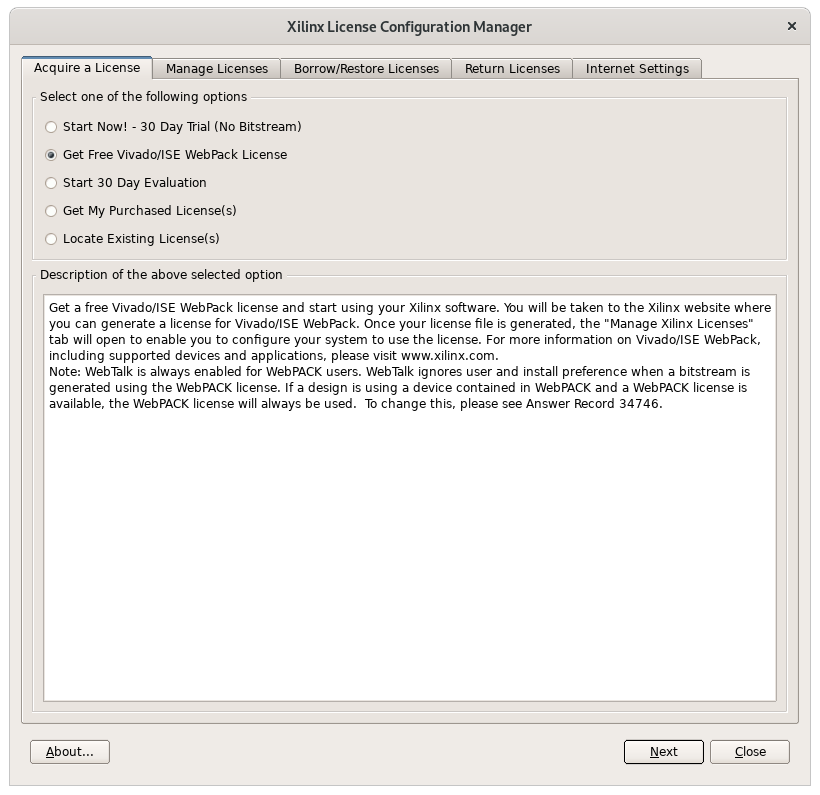
Fig. 5 Möglichkeit zur Auswahl des Lizenztypes.#
Wurde die Lizenz heruntergeladen kann diese unter “Manage License” hinzugefügt werden. Innerhalb des Dialogfeldes Abbildung 6 kann zum Speicherort der Lizenzdatei navigiert werden.
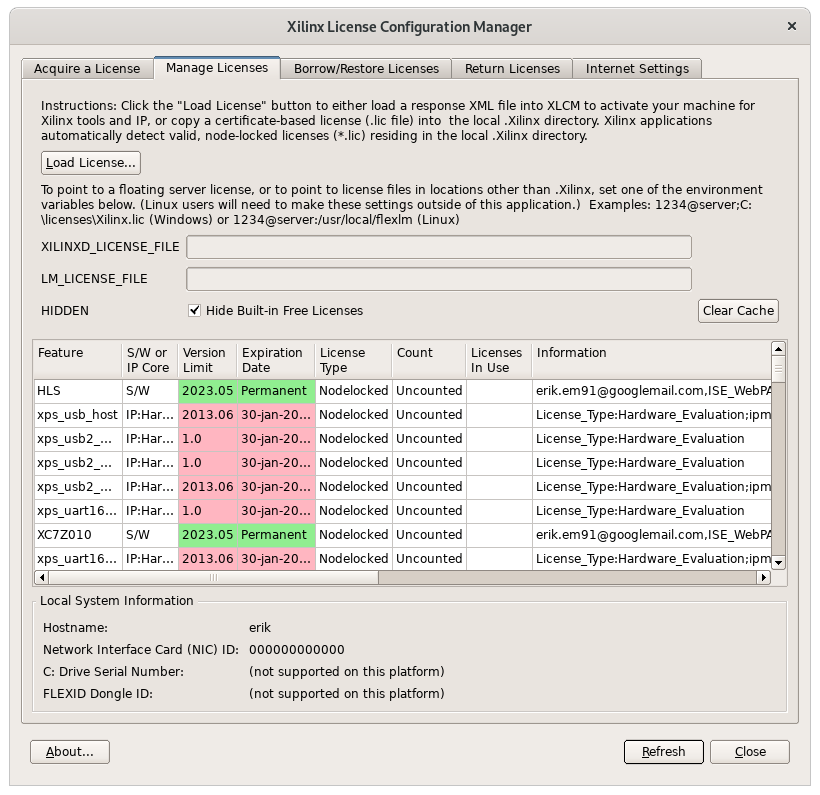
Fig. 6 Unter Load Licence wird der Speicherort der Lizenzdatei ausgewählt.#
Nachdem das ISE WebPack
heruntergeladen
installiert
gestartet und
lizensiert
wurde, wird im nächsten Schritt die Programmierumgebung installiert.
Installation von Alchitry Labs#
Ein Großteil der Installation der Toolchain ist zu diesem Zeitpunkt bereits abgeschlossen. Das Einrichten von Alchitry Labs stellt sich leichter dar, als es bei der Xilinx Software der Fall war.
Die Software ist auf der (Website)[https://alchitry.com/alchitry-labs] von Alchitry Labs unter dem Reiter Alchitry Labs zu finden. Die Download Links sind unterhalb der Abbildung vom Programm zu finden. Für dieses Projekt wurde die Linux-Version genutzt. Die Linux-Version bietet bei der Installation deutliche Vorteile in der Einrichtung im Vergleich zur Windows-Version, da diese für Windows 10 und 11 nicht mehr optimiert ist. Nach dem Download von knapp 18 MB muss das geladene Archiv ausgepackt werden. Hierfür kann der gleiche Befehl mit geändertem Dateinamen genutzt werden.
- Terminalausgabe
mojo@fpga:/Downloads/$ tar -xvf alchitry-labs-1.2.7-linux.tar
Nach der Installation wird in den Unterordner “alchitry-labs-1.2.7” navigiert und das Programm mit folgendem Befehlt gestartet:
- Terminalausgabe
bash alchitry-labs
Ist die Installation bisher erfolgreich und korrekt öffnet sich nun die Programmierumgebung. Die Software erfragt beim ersten Starten den Installationsort des Builders ISE WebPack. Im Programmfenster kann über “Settings” und “ISE Location” über ein Dialogfeld der Installationsort des ISE WEbPack ausgewählt werden.( siehe: Abbildung 7). Hierbei ist darauf zu achten, dass der Ordner mit der entsprechenden Versionsnummer ausgewählt wird (hier: 14.7). Die Software Alchitry Labs gibt entsprechende Hinweise innerhalb des Dialoges.
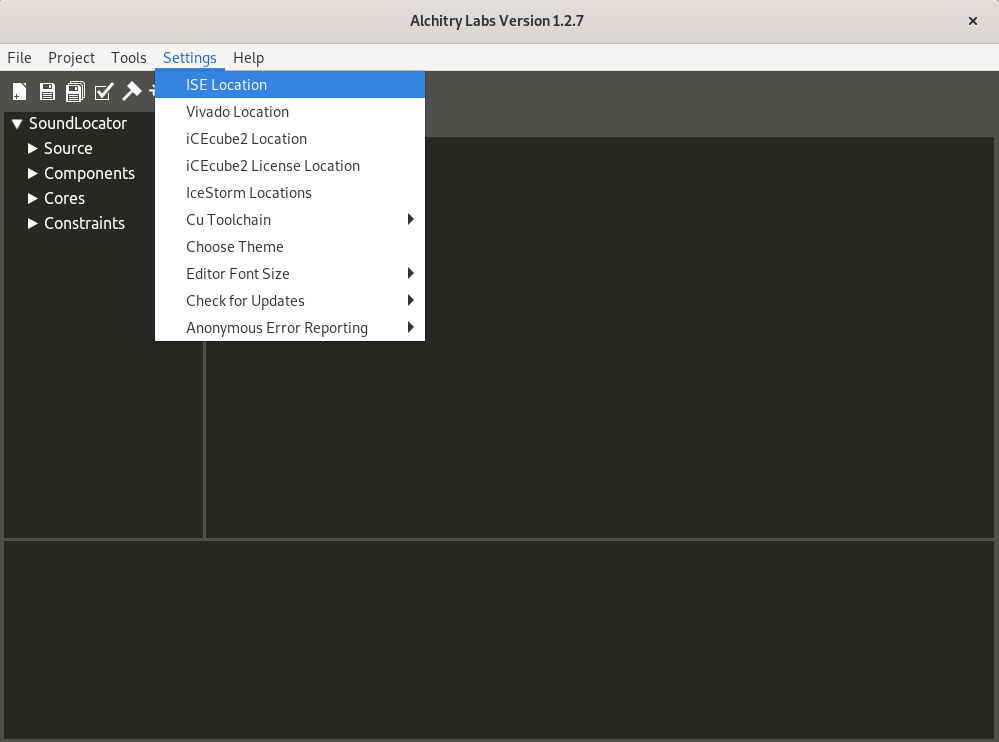
Fig. 7 Auswahl des ISE WebPack Installationsortes#
Ab diesem Zeitpunkt ist es möglich Projekte zu öffnen und zu erstellen.
Öffnen des Projektes#
Beim ersten Starten von Alchitry Labs startet automatisch ein Dialog, in dem erfragt wird, ob bereits ein Projekt vorhanden ist. Siehe: Abbildung 8
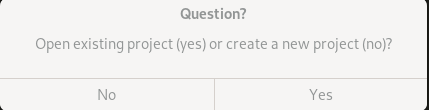
Fig. 8 Erste Projektauswahl#
Durch die Auswahl “No” wird der User in ein weiteres Dialogfenster geführt, indem dieser ein Projekt erstellen kann.
Dieses Dialogfenster ist in Abbildung 9 zu sehen. Im Feld “Project Name:” wird der Wunschname des neuen Projektes eingegeben. Im folgenden Reiter “Workspace” steht die Arbeitsumgebung. Hier werden Projekte abgespeichert und Projektumgebungen (Arbeitsverzeichnisse) erstellt, die notwendige Dateien für den “Build-Prozess” bereitstellen. Im dritten Reiter wird das entsprechende Board ausgewählt. Für dieses Projekt ist das das Mojo Board. Das Programm erstellt hier für automatisch die Bezüge zu Hardware, damit das Projekt funktionsfähig gebaut werden kann. Die Sprache (“Language”) die ausgewählt werden muss um ein funktionierendes Beispielprojekt laden zu können ist hier das programmeigene Lucid. Es ist ebenfalls möglich innerhalb der Umgebung in Verilog zu coden, allerdings gibt es für Verilog keine Beispielprojekte. Die Beispielprojekte sind auschließlich in Lucid geschrieben. Über ein Dropdown Menü ist es nun möglich, das Sound Locator Projekt auszuwählen und zu laden.
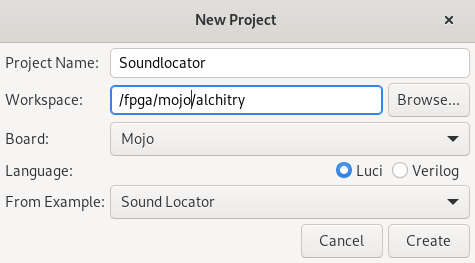
Fig. 9 Einstellungen zum Öffnen des Sound Locator Beispiels#
Durch einen letzten Mausklick auf den Button “Create” wird das Beispielprojekt erstellt. Im nächsten Abschnitt wird beschrieben, welche Arten von Files man innerhalb des Projektes finden kann und was diese tun. Die Inbetriebnahme des Projektes wird im darauffolgenden Abschnitt beschrieben.
Aufbau eines Projektes#
Source
Der erste Teil innerhalb dieses Projektes sind die Source-Dateien auch Module genannt. Diese beschreiben alle Ein- und Ausgänge der unterschiedlichen Hardware. Die im Projekt genutzten Source-Dateien sind in Abbildung 10 dargestellt. Für das Sound Locator Projekt sind das die Hann-Funktion, der LED-Ring, das mojo-top modul, welches das Mojo Board beschreibt, die pdm-mics zur Definition der Mikrophone und das sound_locator Modul in dem das Delay zur Sound Erkennung ermittelt wird.

Fig. 10 Die Source-Dateien sind als erstes im Projekt zu finden#
Components
Components sind teils vorinstallierte, teils selbst geschriebene Bausteine, die für spezielle Funktionen verwendet werden können. Im vorliegenden Projekt finden sich vielfach Lucid-Files, mit der Dateiendung .luc. Diese wurden vom Entwickler erstellt, können sich aber auch in der XILINX-Umgebung befinden. Die in diesem Projekt genutzten sind in Abbildung 11 dargestellt.
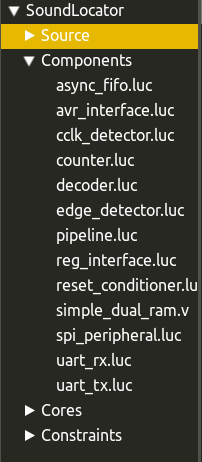
Fig. 11 Als zweites sind die Components im Projekt aufgeführt.#
Cores
Die Cores oder auch IP-Cores sind vorgefertigte weitestgehend von XILINX geteste Bausteine, die spezielle Aufgaben erledigen können und werden von XILINX mitgeliefert. IP steht für Intellectual Property, also geistiges Eigentum. Diese Bausteine sind weitestgehend spezifiziert und bieten somit den Vorteil, dass diese in einem Design mehrfach wiederverwendet werden können. Fertige IP-Cores gibt es von Buskommunikation über digitale Signalverarbeitung wie FFT bis hin zu Multimedia wie Ethernet oder Bluetooth. In diesem Projekt gibt es drei IP cores. Zum einen den Dezimationsfilter, welcher die einkommende PDM Signale dezimiert, um die Informationen mit verringerter Samplefrequenz zu extrahieren. Als zweites gibt es den mag_phase_calculator der aus den einkommenden Signalen die Amplitude und die Phase errechnet und als letztes den xfft_v8_0-core der die FFT auf die einkommenden Signale anwendet.
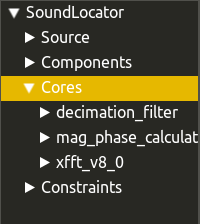
Fig. 12 Der dritte Reiter beinhaltet die IP-Cores#
Constraints
Dargestellt in Abbildung 13 sind die drei User-constraints-files von debugger, microphone shield und vom Mojo Board. In diesen Dateien werden die Timing-Eigenschaften, sowie die Pin-Eigenschaften, physikalischen Eigenschaften und Grenzen beschrieben. Diese Dateien werden benötigt, um dem Syntheseschritt (ISE WebPack) die letzten Informationen zu geben, wie das Projekt erstellt werden soll.
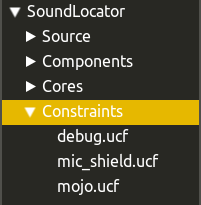
Fig. 13 Als letztes gibt es die Constraints im Projekt#
Sound Locator Projekt#
Im Vorfeld wurden bereits die Hardware, sowie die unterschiedlichen Funktionsblöcke, die das Sound Locator Projekt besitzt beschrieben. Die Dokumentation des Projektes von O’Reilly verspricht ein Plug’n’Play mit der Hardware. Die Untersuchungen innerhalb dieses Projekts haben jedoch gezeigt, dass noch weitere Probleme gelöst werden müssen, bevor das Projekt auf den FPGA geflasht werden kann. In diesem Abschnitt werden diese Probleme genauer beleuchtet, wie diese zu lösen sind und im Anschluss wird die Funktion der Sound-Erkennung getestet.
Probleme mit den IP-cores lösen#
Erinnern wir uns an die IP-Cores, die im letzten Abschnitt beschrieben wurden. Diese stellen eine fertige Funktionseinheit, wie zum Beispiel den Dezimationsfilter, dar. Ausgerechnet diese IP-Cores machen beim ersten Flash-Versuch Probleme und es kommt folgende Meldung die in Abbildung 14 dargestellt ist.

Fig. 14 Angezeigte Fehlermeldung beim ersten Flashversuch#
Alchitry Labs zeigt an, dass es die Dateien für die IP-Cores nicht lesen kann. Schaut man in die Ordnerstruktur und vergleicht diese mit dem agezeigten Pfad, so scheint sich hier ein Fehler bei der Programmierung der Software eingeschlichen zu haben, der es zunächst unmöglich macht, das Projekt zu bauen.
erik@erik:~/alchitry/SoundLocator$ ls
constraint coreGen SoundLocator.alp style=”color:blue”>source work
Es sind in dieser Ansicht vier Ordner zu sehen. Vergeicht man diese vier Ordner mit dem geforderten Pfad von Alchitry Labs aus Abbildung 12 ist zu erkennen, dass der Ordner cores vergeblich in diesem Verzeichnis zu suchen ist. Dieses Vezeichnis wurde automatisch vom Programm erstellt, was die Vermutung nahelegt, dass der Aufbau des Verzeichnises “hard coded” ist. Nach einiger Suche innerhalb des Programmverzeichnises konnte die Codezeile, die dafür verantwortich ist, nicht gefunden werden. Statdessen wurde für die Inbetriebnahme der Hardware ein Workaround gefunden. Die nötigen Dateien befinden sich alle im coreGen Ordner.
Das händische korrigieren des Pfades in drei Schritten:
Umbenennen des coreGen zu cores.
Innerhalb dieses Ordners, erstellen der jeweiligen Ordner für Decimation Filter, xfft_v8.0 und mag_phase_calculator.
Verschieben der Dateien für den jeweiligen core in den entsprechend erstellten Ordner.
Nachdem diese Schritte durchgeführt wurden, kann das Projekt gebaut werden und ermöglicht es uns, das Mojo Board zu flashen und die Funktion des Programmes zu testen.
Funktionsprinzip des Projektes#
In diesem Abschnitt wird die Funktion des gesamten Aufbaus bestehend aus Mojo mit aufgestecktem Microphone Shield evaluiert. Zunächst wird das Funktionsprinzip des Projektes erläutert. In Abbildung 15 ist der Signalfluss der Sounderkennung dargestellt. Am Anfang steht ein Ton in Form einer sinusförmigen Schallwelle an. Diese besteht nicht aus nur einer Frequenz wie in Abbildung 15 dargestellt, sondern setzt sich aus verschiedenen Frequenzen zusammen. Dieses Frequenzspektrum wird ebenfalls dargestellt und diskutiert. Die analoge Sinuswelle wird durch ein Wandlungssystem in die digitale Domäne übertragen. Auf dem Microphone Shield sind für diese Wandlung sogenannte digitale MEMS PDM Mikrofone, die diese Wandlung vornehmen. Die Mikrofone geben eine Puls-Dichte-Modulation (PDM) aus, welche direkt auf das FPGA gegeben wird. Dieses Signal wir dann vom FPGA weiter verarbeitet und anschließend wird das Ergebnis der Richtungserkennung auf dem LED-Ring für den Anwender sichtbar gemacht.

Fig. 15 Übersicht Signalfluss#
Der erste Block des Signalflusses enthält die akustische Welle. Die akustische Welle ist nichts anderes als eine Schallwelle, welche durch das komprimieren und dekomprimieren der Luft entsteht. Für die theoretisch ideale Betrachtung wird in der Physik eine ideale winzige Punktschallquelle angenommen von der aus kugelförmig, also dreidimensional, die Schallwellen in alle Richtungen abgestrahlt werden. Diese Punktquelle und die Ausbreitung der Schallwellen von dort aus sind in Abbildung 16 dargestellt. Diese Wellenfronten in Verbindung mit den dargestellten Strahlen kennzeichnen die Richtung der Schallwellen. Wellenfronten sind hierbei Flächen, bei der die Luftteilchen wertgleiche Auslenkungen, also gleiche Amplituden, aufgrund der erzeugten Schwingung besitzen [Halliday and und Jearl Walter, 2020].
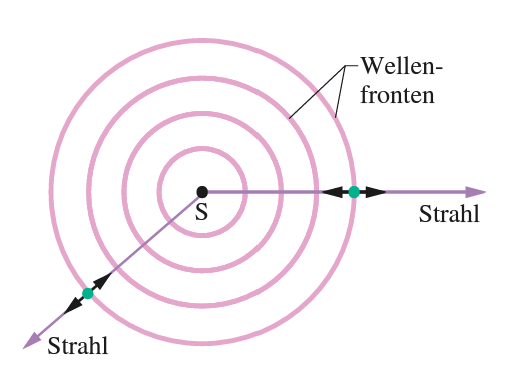
Fig. 16 Zweidimensionale Darstellung zur Ausbreitung einer Schallwelle [Halliday and und Jearl Walter, 2020]#
Wie bereits erwähnt breiten sich diese Schallwellen kugelförmig im Raum aus und werden deshalb auch sphärische Wellen genannt. Diese sphärischen Wellen sind wie in Abbildung 16 gekrümmt. Je weiter man sich von der Punktquelle entfernt, umso geringer wird diese Krümmung und die Schallwelle kann als Ebene verstanden werden. Diese Wellen werden dann ebene oder planare Wellen genannt [Halliday and und Jearl Walter, 2020].
Die Intensität der Schallwelle ist abhängig von der Amplitude der Schallwelle. Die Intensität verringert sich quadratisch in Abängigkeit zum Abstand zur Tonquelle:
Wobei \(I\) die Intensität der Schallwelle ist \(P\) die Leistung durch die Schallwelle und \(r\) der Abstand zur Schallquelle [Halliday and und Jearl Walter, 2020].
Da das menschliche Ohr einen großen Bereich an Intensitäten wahrnehmen kann, wird für die Bewertung von Schallintensitäten die Dezibelskala verwendet. Angaben in der Dezibelskala sind immer Vergleiche (Relationen), bei dem der gemessene Wert mit einem Standardwert verglichen wird. In diesem Fall wird diese als Schallpegel oder Schalldruckpegel bezeichnet und folgendermaßen berechnet:
Wobei \(\beta\) der resultierende Schalldruckpegel ist. \(I\) beschreibt die Intensität der gemessenen Schallwelle und \(I_{0}\) beschreibt einen standardisierten Referenzwert für die Intensität (\(I_0 = 10^{-12} \frac{W}{m^{2}}\)). [Halliday and und Jearl Walter, 2020]
Um einen Ton zu erzeugen muss diese (De-)Komprimierung der Luft mit einer definierten Frequenz erzeugt werden. Um beispielsweise den Kammerton C zu erzeugen, muss eine Schallwelle mit einer Frequenz von \(f\)=440 Hz erzeugt werden. Idealisiert sieht diese Schallwelle aus wie in Abbildung 17 dargestellt.
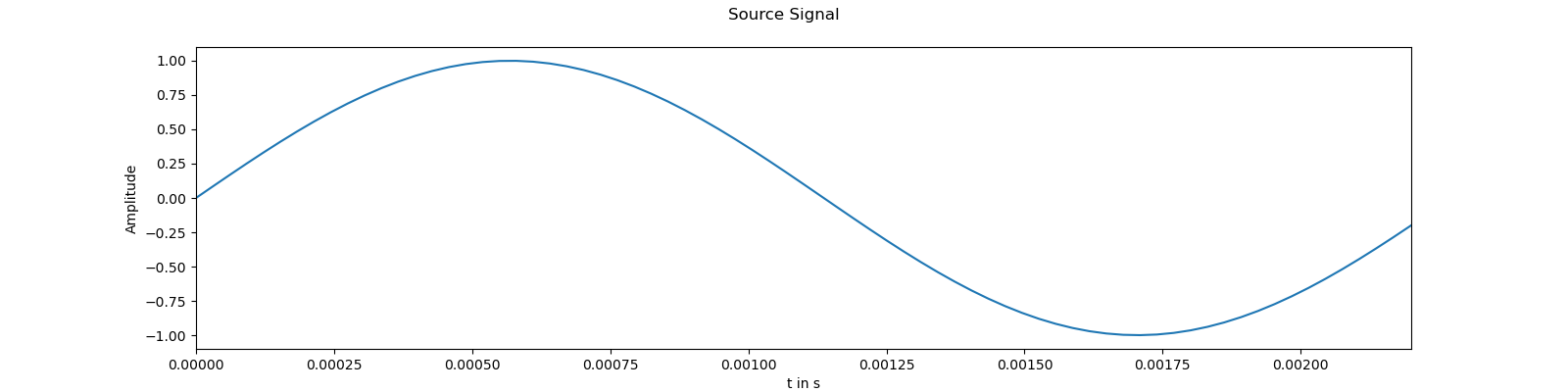
Fig. 17 Sinuswelle mit \(f\)=440 Hz#
Aus dieser Darstellung ist es ein Einfaches, die Frequenz des Signals abzulesen und damit das Signal zu rekonstruieren. In der realen Welt ist die Wahrheit nicht so eindeutig und das eintreffende Signal auf das Mikrofon ist mit Rauschen überlagert wie in Abbildung 18 dargestellt.
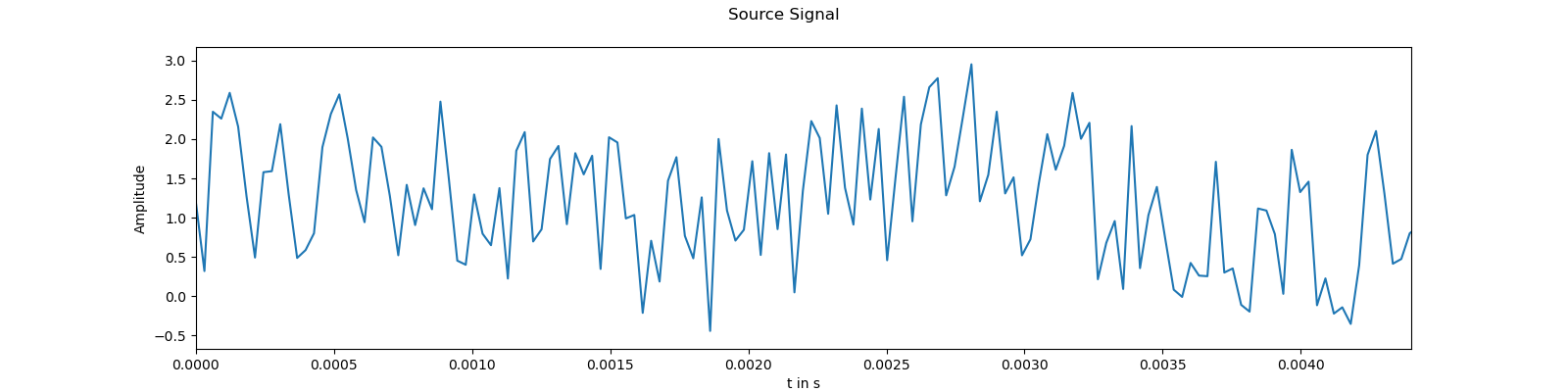
Fig. 18 Sinuswelle mit \(f\)=440 Hz überlagert mit Rauschen#
Im dargestellten Zeitbereich ist es nicht einzuschätzen, welches Signal der Grundton ist und welche Frequenz er hat. Um die Reaktion der Hardware auf die eintreffenden Töne besser einschätzen oder erklären zu können, ist es deshalb nötig, das Signal nicht im Zeitbereich zu betrachten, sondern mit Hilfe einer FFT (Fast-Fourier-Transformation) im Frequenzbereich (Spektralanalyse). Das Frequenzspektrum des Signals aus Abbildung 18 ist in Abbildung 19 zu finden.
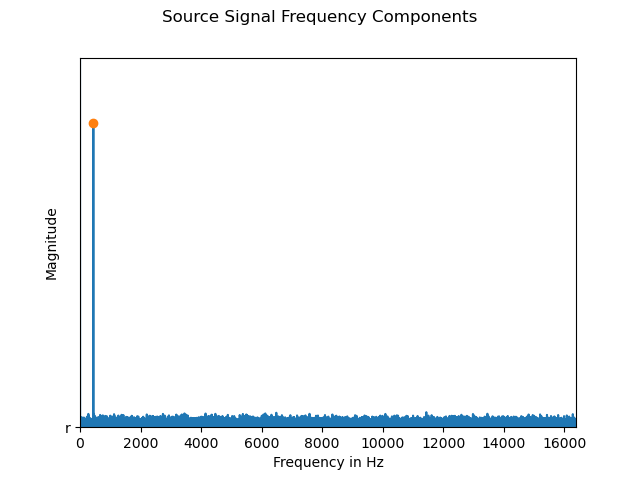
Fig. 19 Frequenzspektrum des verrauschten Signals.#
An der Y-Achse ist die Amplitude der Frequenzanteile aufgetragen und auf der X-Achse sind die unterschiedlichen Frequenzen dargestellt. Sie zeigt uns aus welchen Frequenzanteilen das Ausgangssignal zusammengesetzt ist. Das Rauschen mit seinen vielen Frequenzen, die gleichermaßen im Signal enthalten sind, verschwinden mit Hinblick auf die Amplitude förmlich im Gegensatz zum eigentlichen Signal. Mit Hilfe dieser Methode ist es möglich auch aus im Zeitbereich verrauschten oder uneindeutigen Signalen das gesuchte Signal herauszufinden bzw zu erfahren, welche Frequenzen im untersuchten Signal enthalten sind.
Nachdem geklärt wurde, welche Eingangssignale zu erwarten sind, kann der Fokus auf die akustische Aufnahme gerichtet werden. Auf dem Microphone Shield sind sieben Mikrofone mit der Bezeichnung SPK0415HM4H zu finden. Diese Mikrophone sind digitale Mikro-Elektro-Mechanische Systeme (MEMS). Das bedeutet, dass durch Herstellungsmethoden der Halbleiterindustrie ein Bauteil erzeugt wurde, dass sowohl elektronische als auch mechanische Eigenschaften vereint. Wie in Abbildung 20 zu erkennen ist, besitzt ein solches Mikrofon einen Sound Port, dies ist eine Öffnung im Gehäuse (Can) des Bauteils. Hier kann der Ton auf die eigentliche Struktur des Mikrofons auftreffen. Die Öffnung ist hier oben auf dem Gehäuse, kann bei anderen Mikrofonen aber auch am Boden des Gehäuses sein. Darunter befindet sich eine Membran (Glob Top Molding) über einer Halbleiterträgerstruktur. Die Membran und die Trägerstruktur sind zwei gerade, gegenüberliegende Flächen zwischen denen ein Material zu finden ist, das als Dielektrikum verstanden werden kann. Dieser Aufbau verhält sich wie ein Kondensator mit einer bekannten Kapazität. Beim Auftreffen von Schall gerät die Membran in Bewegung, was zur Folge hat, dass sich die Kapazität des Kondensators, durch die Verringerung des Abstandes zwischen den zwei Flächen, ändert. Diese Änderung wird von der Anwender Spezifischen Schaltung (ASIC) erkannt und entsprechend verarbeitet. Ob ein analoges oder digitales Signal ausgegeben wird, entscheidet sich hier. Entweder das analoge Signal wird vom ASIC bereitgestellt oder ein weiterer Wandler (ADC) befindet sich innerhalb des Systems, welcher das analoge Signal in ein digitales Signal umsetzt. Bei den digitalen Signalen kann es sich um Pulse-Code-Modulierte (PCM) oder um Puls-Dichte-Modulierte (PDM) Signale handeln. Puls-Code-Modulierte Signale werden hier nicht weiter behandelt, sollen aber der Vollständigkeit wegen Erwähnung finden [Bruce Rose, 21.02.2019].
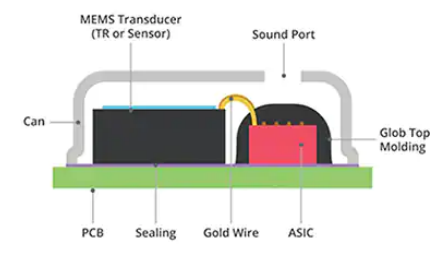
Fig. 20 Aufbau eines MEMS Mikrofons [Bruce Rose, 21.02.2019]#
In diesem Projekt werden Mikrofone verwendet, die Puls-Dichte-Modulierte (PDM) Signale verwenden. Bei der Puls-Dichte-Modulation wird die Information der Amplitude des Signals über die Puls-Dichte dargestellt. Das heißt, dass eine Häufung von logischen High (1) Pegeln eine hohe Amplitude und eine Häufung von logischen Low (0) Pegeln eine niedrige Amplitude bedeutet. Bei der Wandlung durch ein MEMS Mikrophon kann das PDM-Signal eines Sinustons folgendermaßen aussehen.
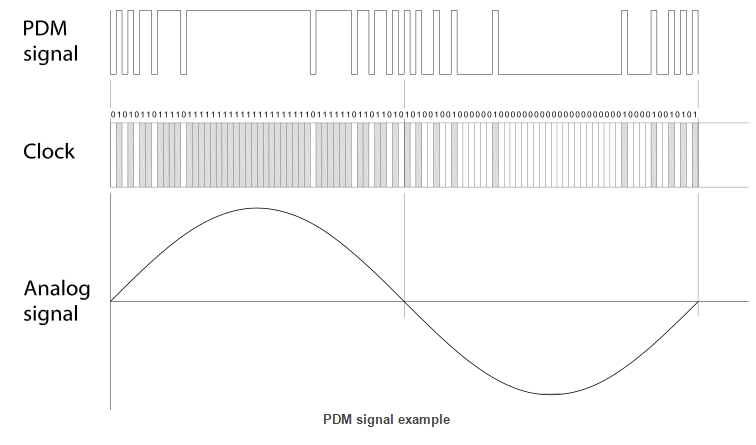
Fig. 21 Übersicht zwischen analogem Signal und Puls-Dichte-moduliertem Signal [Wang, n.d.]#
In Abbildung 21 ist wie beschrieben zu erkennen, dass mit höheren Amplituden vermehrt ein High Pegel zu finden ist. Durch diese periodische Häufung von hohen und niedrigen Amplituden ist nicht nur die Amplitude sondern ebenfalls die Frequenz im PDM-Signal kodiert. Das PDM-Signal ist der letzte Punkt, bevor die Verarbeitung des FPGAs beginnt. Als nächstes kann die Funktion des Projektes betrachtet werden.
Für die Funktion des Projektes werden zunächst Annahmen vom Autor getroffen. Die wichtigste Annahme ist, dass die Richtung des Tons nur in einem zweidimensionalen Raster horizontal zum Mojo Board auf das FPGA auftreffen darf. Das ist dem physikalischen Aufbau des Microphone Shields geschuldet, da alle Mikrofone auf einer Ebene verbaut sind. Außerdem wird angenommen, dass es sich bei den auftreffenden Schallwellen um eine eine gerade Wellenfront, also um eine planare Welle handelt. Die letzte Annahme ist, dass jede Frequenz eines Soundsamples aus einer einzigen Richtung kommt [Rajewski, 2017].
Die Sounderkennung mit dem Mojo errechnet die Richtung des auftreffenden Sounds aus der Phasenverschiebung zwischen den äußeren und dem zentralen Mikrophon. Der auf die Mikrofone treffende Ton wird in ein PDM-Signal umgewandelt und dieses PDM-Signal wird simultan vom FPGA abgetastet. Auf diese Samples wird eine FFT angewandt, wodurch das PDM-Signal von der Zeit- in die Frequenzdomäne überführt wird. Als Ausgabe aus der FFT erhält man nun für jedes Sample eine komplexe Zahl. Bestehend aus dem Realteil, der die Amplitude des eingehenden Signals darstellt und dem Imaginärteil, der die Phase des eingehenden Signals darstellt. Diese können in einem Koordinatensystem aufgetragen werden. In Abbildung 22 ist beispielfhaft für drei Mikrofone das Prinzip dargestellt. Die schwarzen Kreise stellen die Position von drei Mikrofonen auf dem Microphone Shield dar mit ihren in Klammern dargestellten Koordinaten. Der Mittelpunkt des Koordinatensystems ist ebenfalls als Koordinate des zentralen Mikrofons zu verstehen. In Blau in der oberen linken Ecke ist die Richtung dargestellt, aus der ein Ton auf die Mikrofone trifft. Das Auftreffen bewirkt eine Verzögerung (Delay) der jeweiligen äußeren Mikrofone im Vergleich zum mittleren Mikrofon. Mithilfe dieses Delays bzw. mit der Phasenverschiebung zueinander (die Verzögerung ist lediglich der Quotient aus Phasenverschiebung und Frequenz, wodurch diese beiden Werte proportinal zueinander sind) und der Positionsvektoren der unterschiedlichen Mikrofone kann nun die Richtung des Tons bestimmt werden. Hierzu werden die Ortsvektoren mit dem errechneten Delay skaliert, wodurch die violett skalierten Vektoren entstehen. Durch Vektoraddition kann ein Summenvektor erstellt werden, der in die Richtung der Tonquelle zeigt (gelb)[Rajewski, 2017]. Rajewski hat dies Richtungen in 16 verschiedene Bins eingeteilt, wodurch die Einteilung auf die LEDs erfolgt.
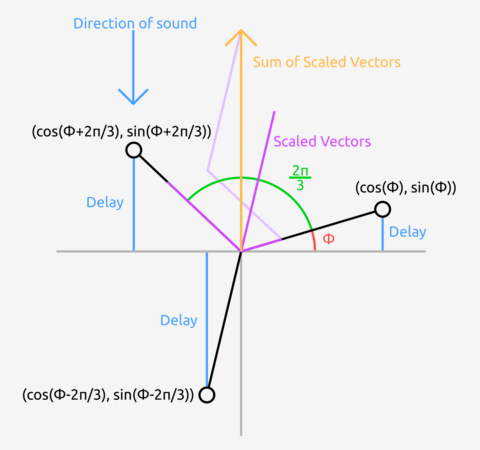
Fig. 22 Vektorielle Darstellung des Erkennungsprinzips [Rajewski, 2017]#
Funktionstest#
Die beschriebene Funktion soll mit den nächsten Tests überprüft werden. Die grundsätzlichen Funktionstest beinhalten einen Sprachtest und einen Test bei dem mit einer Gitarre ein Lied angespielt wird. Für den ersten Test wird der Mojo auf einem Holztisch platziert und es wird das Alphabet durchgesprochen. Die Tonquelle ist in diesem Video von Links und die Quelle ist horizontal verschoben zum Mojo, um die Annahmen des Erfinders zu berücksichtigen, dass die Tonquelle auf der selben Ebene sein muss wie die Mikrofone. Es ist zu erkennen, dass bei S-Lauten (die Buchstaben C, S, X, Z) mehr als nur eine LED leuchtet. Alle anderen Buchstaben haben insgesamt eine eindeutige Antwort des Mojos verursacht. Eine eindeutige Antwort heißt, dass die LED geleuchtet hat, aus der der Ton auf den Mojo getroffen ist.
Betrachtet man zu den Beobachtungen nun das Frequenzsspektrum zu den ersten sieben Buchstaben des Alphabets, ist zu erkennen, dass der größete Schallpegel bei Frequenzen zwischen \(f\)=60 Hz und \(f\)=400 Hz zu finden ist. Der Buchstabe “C” ist in dieser Abbildung 23 der dritte Balken von Links. Das Diagramm ist ein Frequenz-Zeit-Diagramm. Hierbei sind auf der Y-Achse die unterschiedlichen Frequenzanteile aufgeführt. Auf der X-Achse findet sich der Zeitpunkt in der Audiospur. Die Codierung des Schallwellenpegels ist in der Helligkeit der Balken zu erkennen. Diese Darstellung war die Beste für diese Anwendung, da durch die Art des Versuchs verschiedene Töne zu unterschiedlichen Zeiten auftreffen. Dieses Diagramm bietet eine übersichtliche Darstellung für diese Zwecke. Für den Buchstaben “C” ist zu erkennen, dass zu Beginn des Buchstabens ein höherer Schalldruckpegel zu erkennen ist. Dieser reicht von einer Frequenz von \(f\)=4 kHz bis zu mehr als \(f\)=16 kHz. Interessanterweise ist eine konträre Beobachtung beim Buchstaben “F” zu erkennen. Der zweite Balken von Rechts hat zu Beginn des Buchstabens ein ähnliches Frequenzmuster wie die anderen. Nach einer kurzen Zeit verteilt sich der Schalldruckpegel gleichmäßig auf eine größere Bandbreite an Frequenzen. Hier konnte jedoch eine gute Funktion des Mojo beobachtet werden. Der Schalldruckpegel bei diesem Versuch konnte etwa zwischen \(\beta\)=60 dB und \(\beta\)=70 dB mit dem Schalldruckpegelmesser gemessen werden.
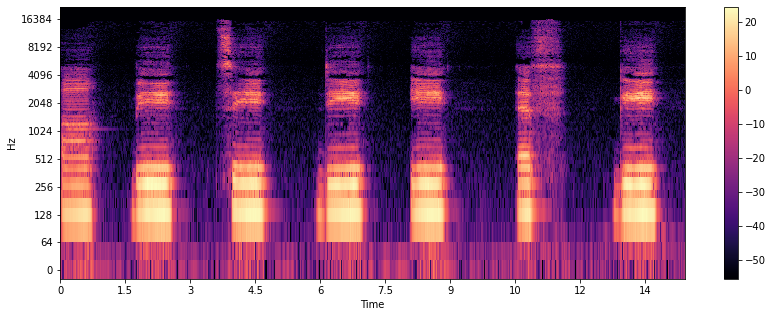
Fig. 23 Frequenzspektrum für die Buchstaben A bis G#
Nach dieser Beobachtung ist ein weiterer grundsätzlicher Funktionstest mit einer anderen Tonquelle durchgeführt worden. In diesem Funktionstest wurde der Song “Come as you are” von Nirvana angespielt, um die Reaktion vom Mojo zu testen. Die Quelle des Geräusches ist in diesem Video unterhalb des Mojo’s. Es ist zu erkennen, dass die unterste LED am hellsten leuchtet und die Richtung damit erkannt wird. Allerdings ist ebenfalls zu sehen, dass auch LEDs auf der anderen Seite des Kreises aufleuchten.
Das Frequenzspektrum ist in der nachfolgenden Abbildung 24 zu erkennen. Der Schalldruckpegel der Frequenzen scheint hier weniger breit gefächert zu sein als bei dem vorangegangenen Funktionstest. Die Funktion konnte auch hierbei im Wesentlichen nachgewiesen werden, auch wenn es bei diesem Test zum leuchten der gegenüberliegenden LED gekommen ist. Das mehrere LEDs leuchten könnte an der Art der Tonquelle liegen. Wie bei der Sprache ist es bei einem Saiteninstrument wie bei einer Gitarre so, dass die Schwingung nicht sauber eine Frequnez besitzt. Eine Annahme des Projektes war, dass eine Frequenz lediglich aus einer Richtung kommt. Die Durchführung des Projektes in einem üblichen Raum kann allerdings dazu führen, dass Reflexionen an den Wänden des Raumes entstehen und somit eine Frequenz ggf. scheinbar aus zwei oder mehreren Richtung kommen kann. Der Schalldruckpegel der während des Versuchs gemsesen wurde lag bei rund \(\beta\)=70 dB.
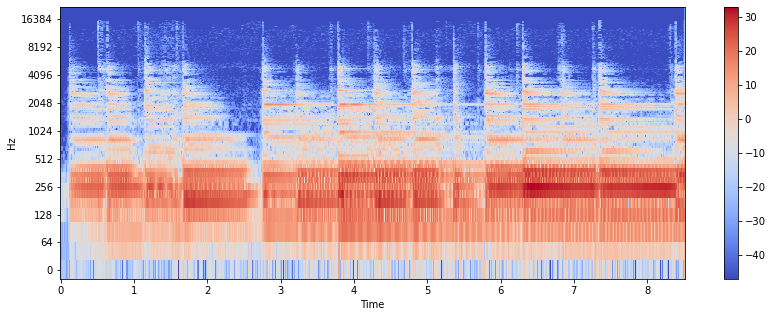
Fig. 24 Frequenzspektrum des Intros von “Come as you are” von Nirvana.#
Die Funktionstests konnten die prinzipielle Funktion nachweisen. Aus den Beobachtungen der ersten beiden Funktionstests kann gefolgert werden, dass die Erkennung eines Tones frequenzabhängig ist, da beim Alphabettest die Buchstaben nicht eindeutig erkannt wurden, bei denen höhere Frequenzanteile (\(f > 10 \, kHz\) “C” und “F”) enthalten sind. Damit stellt sich die Fragen, welche Grenzen der Erkennung bei der Frequenz zu finden sind. Eine weitere Frage die sich beim Konzipieren des Experimentes gestellt hat ist, ob ebenfalls die Lautstärke eines Tones eine Rolle spielt. Um die Grenzen der Sounderkennung zu ermitteln wurde sich in diesem Experiment dazu entschieden, dieses weiter im privaten Wohnzimmer durchzuführen und nicht in einem speziell eingerichtetem schallarmen Raum, da die Sounderkennung dazu dienen soll, Geräuschquellen zu unterscheiden und die Richtung des gesuchten Tons zu ermitteln. Der Aufbau für dieses Experiment ist in den vorangegangenen Videos schon erkennbar, ist der Übersicht wegen nochmal schematisch in Abbildung 25 dargestellt. Das Mojo Board mitsamt des Microphone Shield ist im Zentrum des Aufbaus platziert. Die Soundquelle ist eine Bluetoothbox der Firma Bose und wurde 10 cm oberhalb des Mojo’s aufgestellt. Hier wird ein Sinussignal einer definierten Frequenz und Lautstärke ausgegeben. Um die Lautsärke in Decibel (dB) prüfen zu können, wird ein Schalldruckpegel Messgerät auf der gleichen Höhe wie das zentrale Mikrofon auf dem Microphone Shield platziert, um möglichst exakt die Lautstärke einstellen bzw. prüfen zu können. Bei dem Experiment wirde Gehörschutz getragen, da Schalldruckpegel von bis zu \(\beta\)=111 dB getestet werden.
Note
Bei einem solchen Versuch muss immer ein Gehörschutz getragen werden! Diese Lautstärken können das Hörvermögen verringern und sind gesundheitsschädlich!
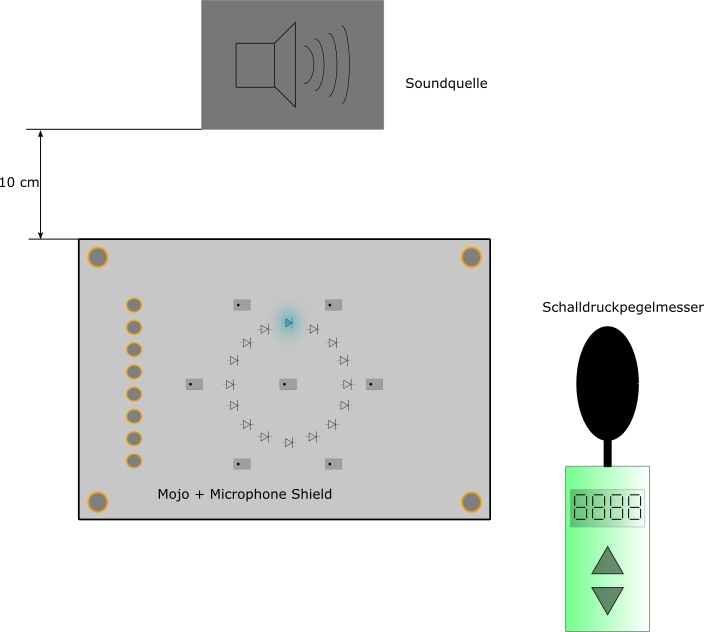
Fig. 25 Versuchsaufbau für den Funktionstest#
Zunächst wird die Grenze der Lautstärke getestet. Hierfür wird die Lautsärke einen Sinustones mit einer Frequenz von \(f\)=1 kHz langsam von \(\beta\)= 40 dB Schalldruckpegel bis \(\beta\)=111 dB Schaldruckpegel erhöht und die Funktion wird beobachtet. Jede Lautstärke wird für eine Zeit \(t\)=3 s gehalten. Die Funktion gilt als sicher vorhanden, solange ausschließlich die LED leuchtet, die in die Richtung der Tonquelle ausgerichtet ist. Die gewählte Frequenz wurde anhand des Datenblattes der Mikrofone gewählt. Die Testbedigungen für die Mikrofone sind im Datenblatt mit einer Frequenz von \(f\)=1 kHz und einem Schalldruckpegel \(\beta\)=91 dB angegeben.
Für die Soundausgabe wurde folgendes Pythonskript mit dem Paket PyAudio genutzt.
Aus dem Code ist zu erkennen, dass mit jedem Schleifendurchlauf die Lautsärke um 0.1, also 10% erhöht wird. Der Versuch musste allerdings in vier Durchläufen durchgeführt werden wobei das Skript in jedem der Durchläufe einmal ausgeführt wurde. Bei jedem Durlauf wurde die Systemlautstärke des genutzten Laptops erhöht, da es nicht möglich war inerhalb einer statischen Systemeinstellung den gesamten Lautstärkebereich von \(\beta\)=40 dB bis \(\beta\)=111 dB zu durchlaufen. Die genutzten Systemlautstärken in Prozent sind am Ende des Pythonskriptes im Kommentar zu erkennen.
In dem Video ist zu sehen, dass die Funktion sicher ab einem Schalldruckpegel von \(\beta\)=47 dB gegeben ist. Mit steigender Lautstärke ist die Funktion immer deutlicher, bis zu einem Schalldruckpegel von \(\beta\)=99,9 dB laut Anzeige des Schalldruckpegelmessers. Oberhalb dieses Pegels beginnen alle LEDs auf dem Microphone Shield zu leuchten, wodurch keine eindeutige Erkennung der Tonrichtung mehr möglich ist.
Aus diesem Grund wurde ein weiteres Experiment durchgeführt. Der Aufbau bleibt wie dargestellt in Abbildung 22. In diesem Experiment wird die Lautstärke konstant gehalten bei 91 dB und die Frequenz wird angepasst. Der Grund für die 91 dB Schalldruckpegel lassen sich wie erwähnt im Datenblatt der Mikrofone finden. Hierfür wird das Pythonskript insofern abgeändert, als dass lediglich eine Frequenz einmalig ausgegeben wird. Die for-Schleife wird für diesen Versuch ausgeblendet. Bei jeder Frequenz wurde die Lautstärke jedes mal auf 91 dB Schalldruckpegel eingestellt, bevor das Video aufgenommen wurde.
Es ist zu beobachten, dass die Funktion im unteren Frequenzbereich (\(f\)=440 Hz bis \(f\)=700 Hz) zwar zu erkennen ist, allerdings leuchten die Richtungs-LEDs nur schwach. Ein eindeutiges Erkennen der LEDs ist ab einer Frequenz von \(f\)=710 Hz gegeben. Die höchste Frequenz bei der eine eindeutige Funktion beobachtet werden konnte war \(f\)=4937 Hz. Bei höheren Frequenzen konnte beobachtet werden, dass entweder die oberste LED nicht mehr leuchtet oder das meherere LEDs gleichzeitig leuchten, wodurch eine eindeutige Erkennung der Richtung nicht mehr gegeben ist.
Das Frequenzspektrum der Audiospur des Videos ist in Abbildung 26 zu sehen. Es ist zu erkennen, dass die Energiedichte bei den unteren Frequenzen höher ist, als bei den oberen Freqeunzen. Interessanterweise sind bei den unteren Frequenzen außerdem Oberwellen/Harmonische erkennbar.
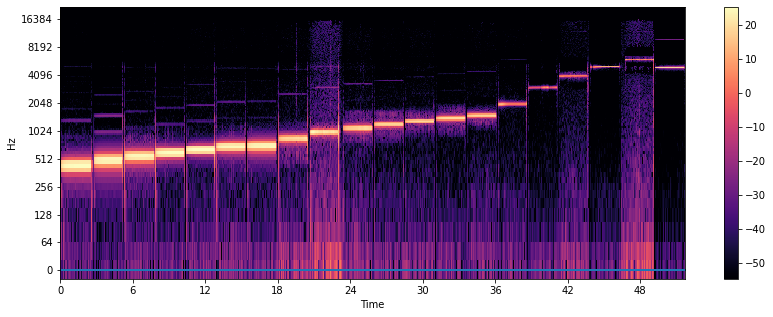
Fig. 26 Spectrumsverlauf des Frequenztests#
Bis hierher konnte die grundsätzliche Funktion und ihre Grenzen getestet werden. Einen Beweis ist diese Arbeit jedoch noch schuldig geblieben. In der theoretischen Erläuterung des Signalflusses wurde erwähnt, dass das PDM-Signal die Informationen über den eingehenden Ton beinhaltet. Hierfür wurde der Datenausgang eines Mikrofons mit einem Logic Analyzer verbunden, um das ausgehende Signal aufzunehmen. Der Aufbau ist in Abbildung 27 zu erkennen.
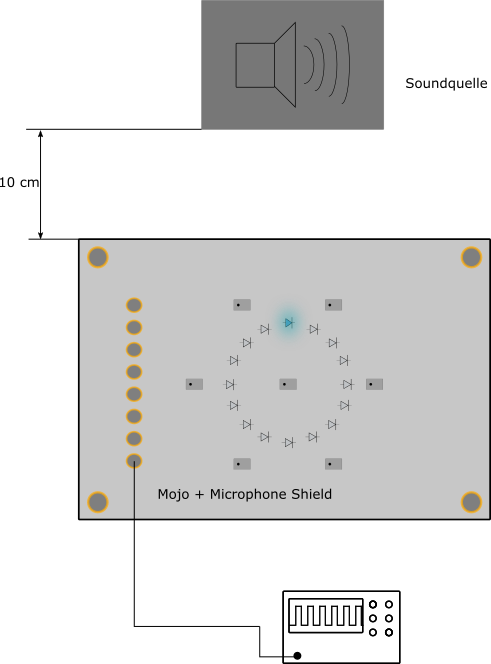
Fig. 27 Frequenzspektrum des PDM Signals#
Es wurde ein Ton mit einer Frequenz von \(f\)=1 kHz von der Bose Box abgespielt. Innerhalb dieses Zeitraums wurde das ausgehende Signal vom Mikrofon und vom Datenlogger aufgenommen. Die erzeugten Daten wurden mit folgendem Pythonskript ausgewertet:
Mit Hilfe dieses Skriptes wurde dann das Spektrum erzeugt, welches in Abbildung 28 dargestellt ist. Im Spektrum ist zu erkennen, dass die höchste Amplitude des Frequenzspektrums bei \(f \approx\) 1 kHz zu finden ist. Demnach trägt das PDM-Signal die Information über die Frequenz des eingespielten akustischen Signals.
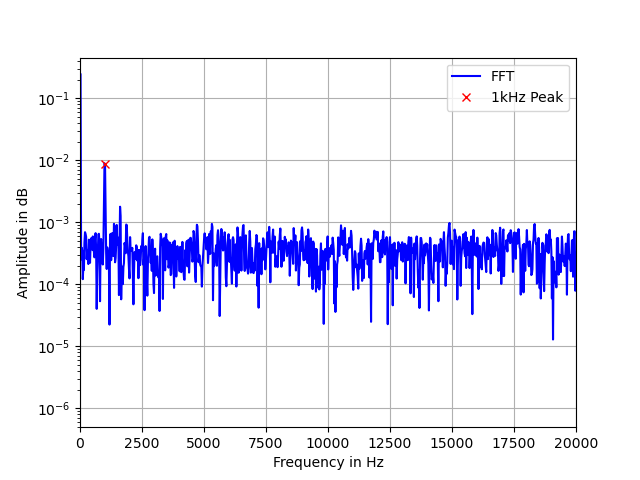
Fig. 28 Aufbau zur Untersuchung des PDM Ausgangssignals.#
Was hier ebenfalls sichtbar wird ist, dass die Betragsdifferenz nicht eindeutig wirkt. Das zeugt von einem schlechten Signal-zu-Rausch-Verhältnis (SNR). Ein Grund für das schlechte SNR kann am Aufbau des Versuchs liegen. Die Ausgangsfrequenz des PDM-Signals betrug messtechnisch \(f_{Out}\)=5.8 MHz und für die Verbindung von Logic Analyzer und Microphone Shield wurden Jumper-Wire verwendet. Das kann dazu geführt haben, dass andere Signale auf die Leitung eingekoppelt haben und somit störende Frequenzanteile mitgemessen wurden.
Fazit#
Das Mojo V3 Board bietet mit dem Microphone Shield eine gute Möglichkeit einen Einblick in komplexes FPGA Design zu wagen. Neben diesem sehr interessanten Projekt für fortgeschrittenes FPGA Design finden sich auf Alchitry Labs weitere Projekte für jeden Schwierigkeitsgrad. Mit Lucid bieten Sie ebenfalls einen niederschwelligen Einstieg für alle, die Microkontroller Programmierung gewöhnt sind, da Lucid die Hürde kleiner machen soll als den Sprung von z.B. C zu VHDL. Sollte jemand größeres Interesse daran finden, FPGA Design weiter zu vertiefen und eigene Projekte zu entwickeln, würde ich nach diesen Erfahrungen und Beobachtungen empfehlen den Fokus auf VHDL oder Verilog als Beschreibungsspraache zu legen und nicht zu lange den Umweg über Lucid zu nehmen.
Das FPGA was auf dem Mojo V3 Board verbaut ist wird nicht mehr von XILINX unterstützt und auch Alchitry Labs hat weitere Boards entwickelt, welche von Ihnen Emfohlen werden und die sicherlich einen Blick wert sind. Die Untersuchungen von Alchitry labs und von diesem Projekt sind mit dieser Arbeit noch nicht abgeschlossen. Folgende Aufgaben könnten für zukünfitge Projekte interessant sein:
Übertragen der Projektdateien von Lucid in VHDL oder Verilog. Lucid ist eine von Alchitry Labs entwickelte Beschreibungssprache, die es Programmierern von Mikrocontrollern leichter machen soll von der Mikrocontroller-Programmierung auf FPGA-Programmierung umzusteigen bzw. dieses überhaupt zu probieren.
Ein weiterer Versuch könnte sein zu testen, ob andere Frequenzgrenzen erreicht werden können, wenn andere Lautstärkepegel genutzt werden können.
Das Gleiche gilt umgekehrt bei der Frage, ob andere Lautstärkepegel erreicht werden können, wenn eine andere Frequenz für den Versuch genutzt wird.