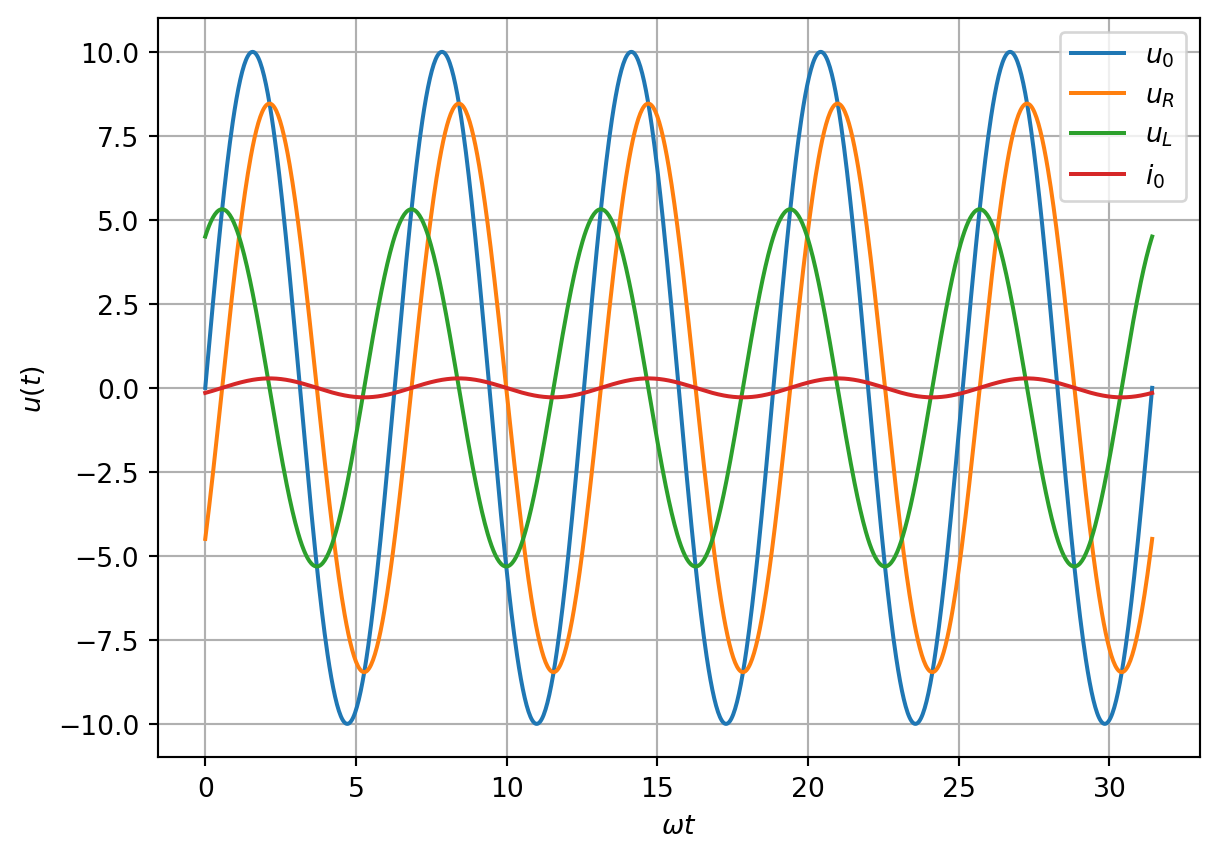
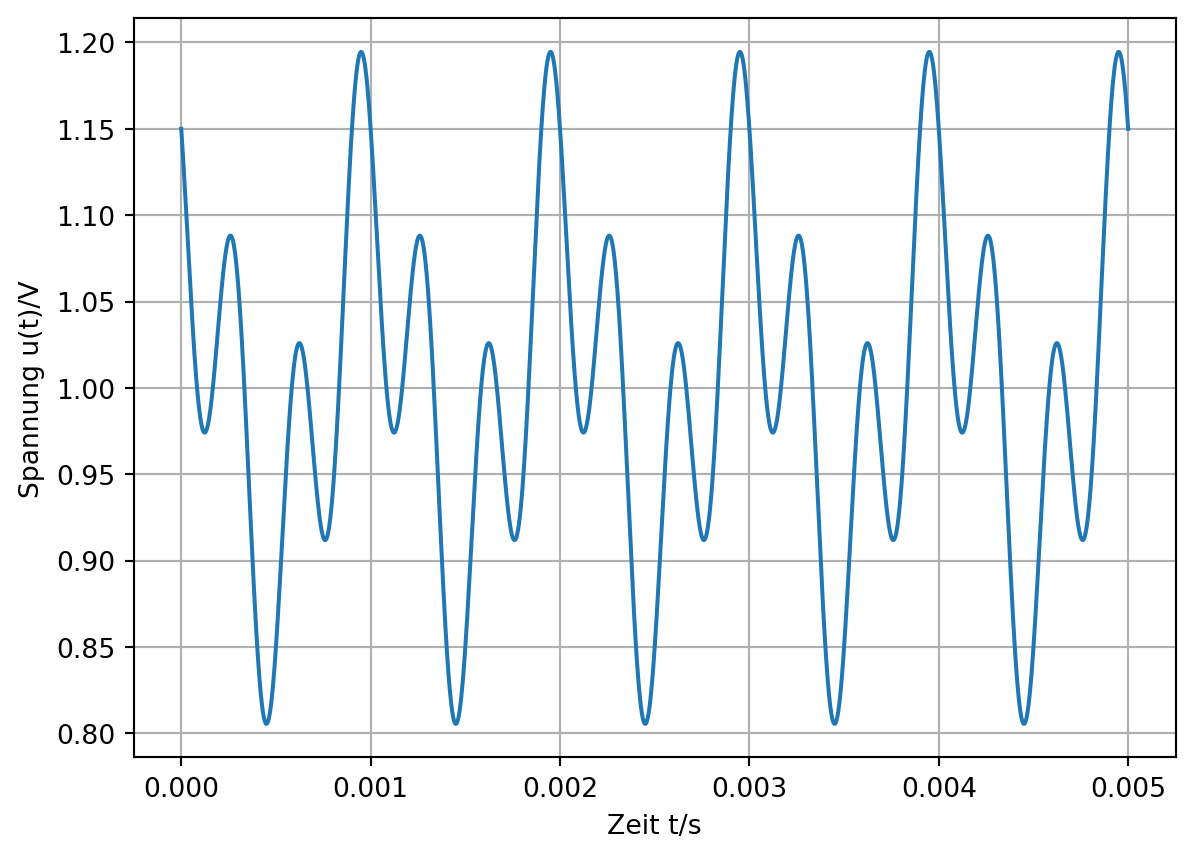
Berechnen Sie den Effektivwert \(U_{eff}\) der Spannung \(u(t)\)! Wie läßt sich \(U_{eff}\) aus den Effektivwerten der drei Einzelspannungen berechnen?
Die letzte Gleichung ist eine sog. Fixpunktiteration, deren numerische Lösung im Programmcode formuliert ist. Nach ein paar Iterationschritten erhält man \(\omega_1 t_{max}\) = -0.315. Daraus ergeben sich \(U_{max}\) = 1.195 V und \(U_{eff}\) = 1.005 V.
Der gesuchte Formfaktor berechnet sich zu:
\[
\frac{U_{max}}{U_{eff}} = 1.189
\]
10.3 Schaltungsberechnung in reeller Schreibweise
Abbildung 10.4: Netzwerk zur Schaltungsanalyse
Gegeben sei die in Abbildung 10.4 skizzierte Schaltung mit einer Wechselstromquelle \(i_0(t)=\hat{i}_0 \sin(\omega t)\).
10.3.1 Amplitude und Phase
Berechnen Sie Amplitude und Phasenwinkel jeweils von \(u(t)\), \(i_C(t)\) und \(i_R(t)\)!
VorsichtLösung
Sei \(u(t)=\hat{u} \sin(\omega t + \varphi_u)\), dann ergeben sich die Ströme zu:
\[\begin{align}
i_C(t) &= \omega C \hat{u} \sin(\omega t + \varphi_u + \frac{\pi}{2}) = -\omega C \hat{u} \cos(\omega t + \varphi_u) \\
i_R(t) &= \frac{\hat{u}}{R} \sin(\omega t + \varphi_u).
\end{align}\]
Knotengleichung: \(i_0(t) = i_C(t) + i_R(t)\)
\[\begin{align}
\hat{i}_0 \sin(\omega t) &= -\omega C \hat{u} \cos(\omega t + \varphi_u) + \frac{\hat{u}}{R} \sin(\omega t + \varphi_u) \\
\hat{i}_0 \sin(m - \varphi_u) &= -\omega C \hat{u} \cos(m) + \frac{\hat{u}}{R} \sin(m), \quad m=\omega t + \varphi_u \\
\hat{i}_0 \left( \sin(m) \cos(\varphi_u) - \cos(m) \sin(\varphi_u) \right) &= -\omega C \hat{u} \cos(m) + \frac{\hat{u}}{R} \sin(m) \\
\end{align}\]
Koeffizientenvergleich:
\[\begin{align}
\hat{i}_0 \cos(\varphi_u) &= \frac{\hat{u}}{R} \\
\hat{i}_0 \sin(\varphi_u) &= -\omega C \hat{u} \\
\tan{\varphi_u} = \frac{\sin(\varphi_u)}{\cos(\varphi_u)} &= \frac{-\omega C \hat{u}}{\frac{\hat{u}}{R}} = -\omega R C \\
\varphi_u &= \arctan(-\omega R C)
\end{align}\]
\[\begin{align}
\hat{i}_0 \cos(\varphi_u) &= \frac{\hat{u}}{R} \\
\hat{u} &= R \hat{i} \cos{\varphi_u} = R \hat{i} \frac{1}{\sqrt{1+\tan^2(\varphi)}} \\
&= \frac{R \hat{i}}{\sqrt{1+(\omega R C)^2}} \\
\hat{i}_C &= \omega C \hat{u} \\
\hat{i}_R &= \frac{\hat{u}}{R}
\end{align}\]
10.3.2 Spannungsverläufe
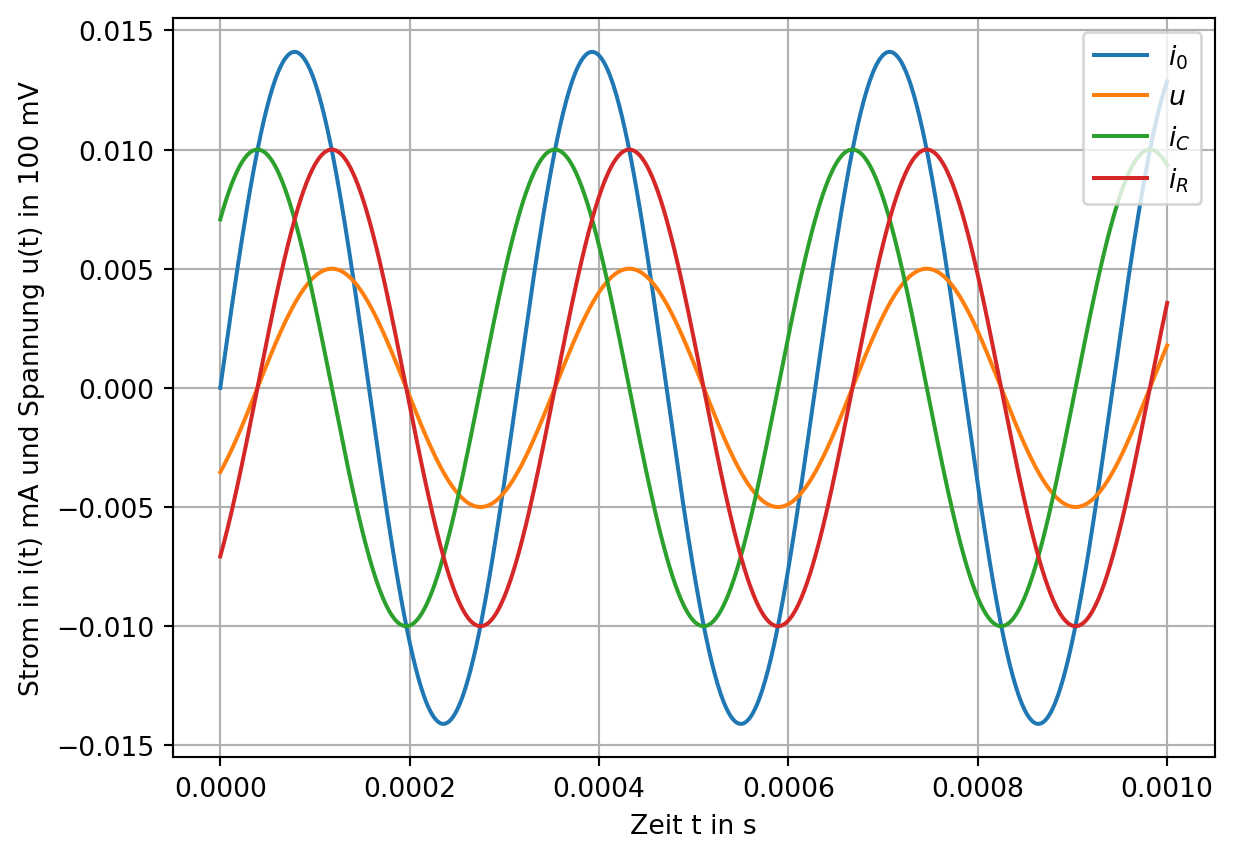
Skizzieren Sie mithilfe von Python \(i_0(t)\), \(u(t)\), \(i_C(t)\) und \(i_R(t)\) für \(\hat{i}_0\) = 14.1 mA, \(f\) = 3.183 kHz, \(R\) = 50 \(\Omega\) und \(C\) = 1 \(\mu\) F!
import numpy as npimport matplotlib.pylab as pltf =3.183e3# Frequenz kHzw =2* np.pi * f # KreisfrequenzR =50# Widerstand in OhmC =1e-6# Kapazität in Faradi0p =14.1e-3# Stromt = np.linspace(0, 1e-3, 1000) # Länge der x-Achse und# Strom- und Spannungfunktioneni0 = i0p * np.sin(w * t) # Stromquelleu =5e-3* np.sin(w * t - np.pi /4) # SpannungiC =10e-3* np.sin(w * t + np.pi /4) # Strom am KondensatoriR =10e-3* np.sin(w * t - np.pi /4) # Strom am Widerstand# Plot der Signaleplt.figure()plt.plot(t, i0, label='$i_0$')plt.plot(t, u, label='$u$')plt.plot(t, iC, label='$i_C$')plt.plot(t, iR, label='$i_R$')plt.xlabel('Zeit t in s')plt.ylabel('Strom in i(t) mA und Spannung u(t) in 100 mV')plt.legend(loc='upper right')plt.grid()plt.show()
Abbildung 10.5: Strom- und Spannungsverläufe
VorsichtLösung
Mit den Werten ergeben sich folgende Spannungs- und Stromverläufe:
\(i_0(t)\) = 14.1 mA \(\sin(\omega t)\)
\(u(t)\) = 0.5 V \(\sin(\omega t - \frac{\pi}{4})\)
\(i_C(t)\) = 10 mA \(\sin(\omega t + \frac{\pi}{4})\)
\(i_R(t)\) = 10 mA \(\sin(\omega t - \frac{\pi}{4})\)
10.4 Phasenanschnittsteuerung
(a) Halbwelle
(b) Vollwelle
Abbildung 10.6: Phasenanschnittsteuerung
Das Prinzip der Phasenanschnittsteuerung, bei dem gem. Abbildung 10.6 (a) oder Abbildung 10.6 (b) der Stromfluß in einer Halbwelle auf den zeitlichen Bruchteil \(\pi-\alpha\) begrenzt wird, wird z.B. zum Dimmen von Glühlampen und anderen Kleinverbrauchern im Haushalt verwendet. Der Phasenanschnittwinkel \(\alpha\) kann dabei elektronisch mit Thyristoren im Bereich \(0 \leq
\alpha \leq \pi\) eingestellt werden [1].
In den hier zu untersuchenden Fällen (a) und (b) wird ein ohmscher Verbraucher mit \(R\) = 100 \(\Omega\) mit Netzspannung (\(U_{0,eff}\) = 230 V, \(\omega\) = 2 \(\pi\) 50 Hz) und Phasenanschnittsteuerung betrieben.
10.4.1 Aufgabe
Berechnen und skizzieren Sie für den durch den Verbraucherwiderstand \(R\) fließenden Strom \(i(t)\) jeweils Mittelwert, Gleichrichtmittelwert und Effektivwert als Funktion vom Phasenanschnittwinkel \(\alpha\)!