5Grafische Analysemethoden / Darstellungen in Frequenz- und Zeitbereich
5.1 Bode-Diagramm
“Unter Bode-Diagramm (engl. Bode plot) versteht man eine Darstellung von zwei Funktionsgraphen: Ein Graph zeigt den Betrag (Amplitudenverstärkung), der andere das Argument (die Phasenverschiebung) einer komplexwertigen Funktion in Abhängigkeit von der Frequenz. Diese Art der Darstellung ist nach Hendrik Wade Bode benannt, welcher diese Diagramme bei seinen Arbeiten in den Bell Laboratories in den 1930er Jahren benutzte.” [1]
der komplexen Zeiger \(\underline{Y}\) und \(\underline{X}\) wird als Übertragungsfaktor des Netzwerks bezeichnet.
Bezeichnet \(\underline{H}(j\omega)\) ein Spannungsverhältnis, so spricht man auch von einem Spannungsübertragungsfaktor; dieser wird durch den Index v bzw. u kenntlich gemacht. Der Betrag von \(\underline{H}_v(j \omega)\) bei der Frequenz \(f = \omega/2 \pi\)
Ein Stromübertragungsfaktor – kenntlich gemacht durch den Index i – bezeichnet entsprechend ein Verhältnis (komplexer) Stromamplituden, während ein Leistungsübertragungsfaktor (Index p) ein Verhältnis zweier (komplexer) Leistungsamplituden bestimmt.
Die Phase \(\varphi\) des Übertragungsfaktors ist frequenzabhängig und errechnet sich aus Real- und Imaginärteil von \(\underline{H}\) gemäß
diese bestimmt die Verzögerung, die ein unendlich ausgedehntes sinusförmiges Signal der Kreisfrequenz \(\omega\) beim Durchgang durch das lineare System erfährt. Die Einhüllende eines endlichen Wellenzugs wird dagegen um die Gruppenlaufzeit
Der Wert von Spannungs-, Strom- und Leistungsverstärkungen wird häufig als sog. Verstärkungsmaß \(a\) in (deziBel) dB angegeben. Bei Spannungs- und Stromverstärkungen wird hierzu der (Zehner-)Logarithmus von \(A(f)\) mit 20 dB multipliziert. Dies führt im Fall der Spannungsverstärkung auf
\[
a_v(f) = 20\,dB \cdot \log(A_v(f))
\]
bzw. im Fall der Stromverstärkung\(A_i(f) = \vert H_i(j2 \pi f)\vert\) auf
\[
a_i(f) = 20\,dB \cdot \log(A_i(f)).
\]
Da \(\log(1) = 0\) gilt, liegt allgemein für \(a(f) > 0\,dB\) Verstärkung vor, für \(a(f) < 0\,dB\) Abschwächung.
Soll eine Leistungsverstärkung in dB ausgedrückt werden, so ist der Logarithmus der Leistungsverstärkung \(G_p(f) = P_2/P_1\) mit 10 dB zu multiplizieren.
\[
a_p(f) = 10\,dB \cdot \log(G_p(f)).
\]
Dabei bezeichnen \(P_1\) und \(P_2\) die Effektivwerte der vom System aufgenommenen bzw. abgegebenen Wirkleistung. Der Hintergrund für den gegenüber \(a_v\) und \(a_i\) halbierten “Vorfaktor” von 10 dB ist, daß die Leistung proportional zum Quadrat von Spannungs- bzw. Stromamplitude ist.
Die “Einheit” dB wird für relative Pegelangaben verwendet, d.h. für die Angabe von Verhältnissen. Daneben werden aber auch absolute Pegelangaben in dB vorgenommen, wobei eine feste Bezugsgröße vorgegeben wird. Erwähnt werden soll hier die gebräuchliche “Einheit” dBm, die für Leistungsangaben verwendet wird und den Effektivwert \(P\) der Leistung bezogen auf 1 mW angibt \(P\) in dBm = \(10\,dB \log(P/1\,mW)\).
Der Übertragungsfaktor \(H(j\omega)\) ist i.allg. eine komplexwertige Funktion der Frequenz. Für die grafische Darstellung der Frequenzabhängigkeit wird üblicherweise das sog. Bode-Diagramm gewählt. Dieses besteht aus zwei Abbildungen: In der einen wird das Verstärkungsmaß \(a\), in der anderen die Phasenverschiebung \(\varphi\) über dem Logarithmus der Frequenz \(f = \omega/2\pi\) aufgetragen. Für \(A(f)\) wird eine doppeltlogarithmische Auftragung gewählt, da Potenzfunktionen dabei Geraden ergeben: Für beliebige Zahlen \(\alpha > 0\) sowie \(m\) gilt
\[
\log(\alpha f^m) = \log(\alpha) + m \log(f)
\]
Wird demnach \(y = \log(a)\) über \(x = log(f)\) aufgetragen, so ergibt sich eine Gerade der Steigung \(m\), wodurch sich diese Größe leicht bestimmen läßt: Ein Anstieg der Spannungsverstärkung \(A_v \sim f\) ergibt z.B. in doppeltlogarithmischer Auftragung eine Gerade der Steigung +1 bzw. 20 dB/dec, ein Abfall \(A_v \sim 1/f\) entsprechend eine Gerade der Steigung −1 bzw. −20 dB/dec. Zeigt \(a_v\) einen Abfall von 40 dB/dec, so kann umgekehrt auf eine Frequenzabhängigkeit \(\sim 1/f^2\) geschlossen werden.
Bezeichnet \(y_0\) den minimalen Wert der Ausgangsgröße eines linearen Netzwerks und \(y_s\) ihren Hub, so läßt sich schreiben
\[
y(t) = y_0 + y_s f(t),
\]
wobei \(f(t)\) nur Werte zwischen 0 und 1 annehmen kann. Diese normierte Ausgangsvariable enthält sämtliche Informationen über das Zeitverhalten des Systems. Ein möglicher Verlauf von \(f(t)\) als Antwort des Systems auf eine Sprungfunktion am Eingang ist in Abbildung 5.1 dargestellt. Zur Charakterisierung des Zeitverhaltens werden zwei Zeitkonstanten eingeführt:
Die Verzögerungszeit\(t_d\), häufig definiert als die Zeit, nach der die Ausgangsgröße die Hälfte ihres Endwerts erreicht hat: \(f(t_d) = 1/2\).
Die Anstiegszeit\(t_r\), oft definiert als der Kehrwert der Steigung von \(f(t)\) bei \(t = t_d\).
(a) \(f(t)\)
(b) \(\dot{f}(t)\)
Abbildung 5.1: Definition von Verzögerungszeit und Anstiegszeit
5.5 Nyquist-Diagramm
“Ein Nyquist-Diagramm, auch als Nyquist-Graph oder Nyquist-Plot bezeichnet, stellt die Ortskurve der Ausgangsgröße eines Regelkreises mit der Frequenz als Parameter dar. Es wird in der Regelungstechnik, Verstärkerkonstruktion und Signalaufbereitung verwendet, um die Stabilität eines Systems mit Rückkopplung zu beschreiben. Benannt ist es nach dem schwedisch-amerikanischen Physiker Harry Nyquist.” [3]
“Passive lineare Schaltungen mit R, L und C an sinusförmigen Signalen sind durch ihre Impedanz, dem Wechselstromwiderstand oder seinem Leitwert, der Admittanz charakterisierbar. Die Schaltungen bilden von der Frequenz abhängige Spannungsteiler, deren Spannungsverlauf im Amplitudenfrequenzgang grafisch darstellbar ist. Die Phasenlage des Ausgangssignals bezogen auf das Eingangssignal kann grafisch im Phasenfrequenzgang gezeigt werden. Beide Darstellungen bilden das komplette Bodediagramm.
Bei gegebenen Bauteilwerten kann für jede Frequenz die Impedanz Z berechnet und als Zeiger in ein Polarkoordinatensystem mit reeller und imaginärer Achse gezeichnet werden. Entsprechend den Achsenparametern gibt die Zeigerlänge dann die Impedanz, Admittanz, Ausgangsspannung oder den Ausgangsstrom an. Die Phasenlage ist durch den Winkel des Zeigers mit der reellen Achse bestimmt.
In der Elektronik beschreibt die Systemtheorie unter anderem das Übertragungsverhalten von Signalen. Eine hilfreiche Voraussetzung ist das Rechnen mit komplexen Größen sowie deren Darstellungen im Polarkoordinatensystem oder der [Einführung in die komplexe Gaußschen Zahlenebene. Die oben genannten komplexen Größen sind von den Bauteilwerten abhängig. Die Impedanz Z einer dimensionierten RC- oder RL-Reihenschaltung ist frequenzabhängig. Die Ortskurve ist die Verbindung der errechneten Impedanzwerte in der komplexen Ebene durch einen Kurvenzug mit der Frequenz als Parameter. Die Zeigerlänge vom Nullpunkt zum Kurvenpunkt auf der Ortskurve entspricht dem skalaren Impedanzwert der aktuellen Frequenz. Der Phasenwinkel bezogen auf die Re-Achse zählt linksdrehend positiv und rechtsdrehend negativ. Die Lote vom Zeigerendpunkt auf die Koordinatenachsen ergeben für die jeweilige Frequenz als Achsenabschnitte die Wirk- und Blindkomponente des Systems.”
Entnommen aus Elektrophysik – Spezielle Grundlagen, Ortskurve[4]
HinweisVergleich zum Zeigerdiagramm
Zeigerdiagramm nur für konstante Parameter
Im Zeigerdiagramm keine Aussagen über Auswirkungen von Änderungen der Frequenz oder Schaltelemente
“Für jeden Wert der Zweipole \(R\), \(L\), und \(C\) oder jede Frequenz müssten gesonderte Zeigerdiagramme erstellt werden.”
“Man verzichtet auf die Darstellung der Zeiger und trägt in der komplexen Zahlenebene nur die Kurve auf.”
5.5.1 Ortskurve einer RC-Schaltung
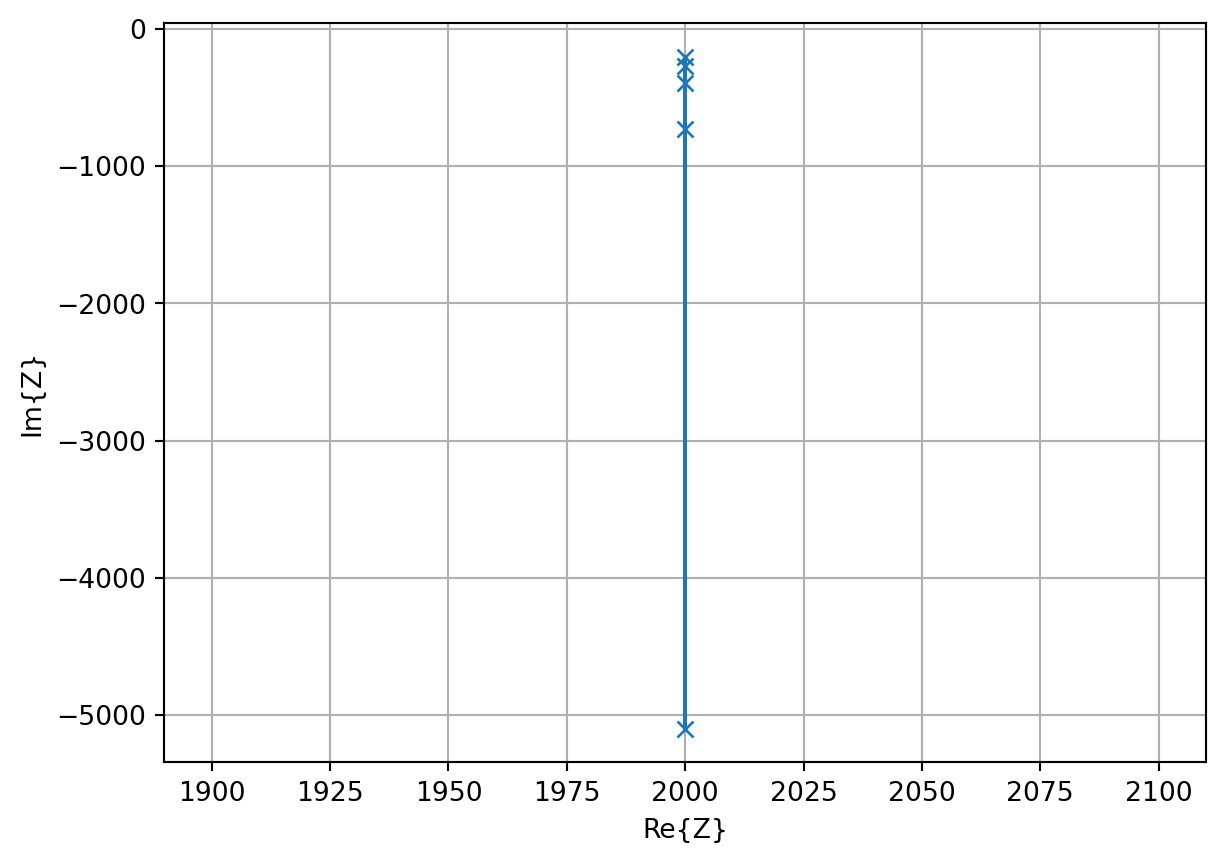
Mit den Bauteilen \(R\) = 2 k\(\Omega\) und \(C\) = 159 nF kann eine Reihen- oder Parallelschaltung gebildet werden. Die komplexe Impedanz der Reihenschaltung ist von der Frequenz abhängig und grafisch in der komplexen Ebene als Ortskurve mit der Frequenz als Parameter dargestellt. Die Blindwiderstandswerte wurden für einen bestimmten Frequenzbereich errechnet und im Polarkoordinatensystem eingetragen. Alle Werte liegen im 4. Quadranten auf einer Geraden. Da der ohmsche Widerstand ist von der Frequenz unabhängig ist, verläuft sie parallel zur imaginären Achse im Abstand von 2 k\(\Omega\). Auf die reelle (Re) Achse bezogen ist der Phasenwinkel der Impedanz negativ. Das Diagramm ist mit den angegebenen gerundeten Rechenwerten des Blindwiderstands, der Impedanz und des Phasenwinkels erstellt.
import numpy as npimport matplotlib.pyplot as plt# Spezifikation der Impedanz/AdmittanzR =2e3C =156e-9f = np.linspace(0.2e3, 5e3, 5)w =2*np.pi*fZ = R +1/(1j*w*C)# Ortskurve der Impedanzplt.plot(Z.real, Z.imag, '-x')plt.grid()plt.xlabel(r'Re{Z}')plt.ylabel(r'Im{Z}')plt.show()
Abbildung 5.3: Ortskurve RC-Tiefpass
“Die Ortskurve kann auch für die Parallelschaltung von R und C mit der Frequenz als Parameter gezeichnet werden. Im Polardiagramm wird sie durch die Zeiger aller Gesamtleitwerte oder Admittanzen gebildet und verläuft im 1. Quadranten parallel zur imaginären Achse. Die Achsenbezeichnungen der Leitwerte werden in Siemens (S) angeben. Die Phasenwinkel sind auf die reelle (Re) Achse bezogen positiv.” [4]
5.5.2 Inversion von Ortskurven
“Bei der Konstruktion einer Ortskurve ist es oft notwendig von der Widerstandsform \(\underline{Z}(\omega)\) auf die Leitwertsform \(\underline{Y}(\omega)\) überzugehen und umgekehrt. Beide Funktionen gehen jeweils aus der Kehrwertbildung der anderen hervor, man nennt sie zueinander inverse Funktionen und die Kehrwertbildung selbst Inversion.” Kap. 5, [5]
Die Inversion der Ortskurve hat als Ergebnis die zur Ausgangsschaltung äquivalente Schaltung. Diese Umrechnung ist immer dann notwendig, wenn es sich um gemischte Reihen- und Parallelschaltungen wie bei T- und \(\Pi\)-Filtern, belasteten Filtern und Schwingkreisen handelt.
Die Ortskurven einfacher RC- und RL-Schaltungen verhalten sich wie folgt:
Verläuft die Ortskurve der Impedanz oder Admittanz im 1. Quadranten, so befindet sich die dazu invertierte Ortskurve im 4. Quadranten.
Die Ortskurve der Impedanz einer Reihenschaltung ist eine Parallele zur imaginären Achse im Abstand des ohmschen Widerstandswerts. Die invertierte Ortskurve der Admittanz ist ein im Nullpunkt endender Halbkreis mit dem Durchmesser des reellen Leitwerts.
Die Ortskurve der Admittanz einer Parallelschaltung ist eine Parallele zur imaginären Achse im Abstand des reellen Leitwerts. Die invertierte Ortskurve der Impedanz ist ein im Nullpunkt endender Halbkreis mit dem Durchmesser des ohmschen Widerstandswerts.
Inversion eines Punktes (Widerstandsform/Impedanz): \(\underline{Z} (5 + 5j) \Omega\)
Ma{}stäbe \(M_Z = 2 \Omega/cm\) und \(M_Y = 0.1 S/cm\)
Inversion von Ortskuven durch Inversion einzelner Punkte:
In die komplexe Zahlenebene wird der Zeiger \(Z\) eingetragen, dessen Spitze invertiert werden soll.
Um den Ursprung des Koordinatensystems wird ein Inversionskreis mit beliebigem Radius \(r\) geschlagen.
Von der Spitze des Zeigers \(Z\) aus werden Tangenten an den Kreis gelegt, sie ergeben die Berührungspunkte \(T_1\) und \(T_2\). Die Tangentenpunkte kann man auch finden, wenn man um die Mitte des Zeigers einen Kreis mit dem Radius \(Z / 2\), d.h. einen Thaleskreis, schlägt (siehe Höhensatz).
Die beiden Punkte \(T_1\) und \(T_2\) werden miteinander verbunden.
Wo die Verbindungslinie den Zeiger \(Z\) schneidet, liegt die Spitze des konjugiert komplexen Zeigers \(Y^*\).
Spiegelt man den Zeiger \(Y^*\) an der reellen Achse, so erhält man \(Y\). Die Spitze dieses Zeigers entspricht also der invertierten Spitze von \(Z\).
Bezeichnet man die Maßstäbe für den komplexen Scheinwiderstand mit \(M_Z\) und den Scheinleitwert mit \(M_Y\) sowie die Länge des Zeigers \(Z\) mit \(L_Z\) und die der Zeiger \(Y\) bzw. \(Y^*\) mit \(L_Y^*\) bzw. \(L_Y\), so ist – da das Dreieck 0T1P rechtwinklig ist – nach dem Kathetensatz
Ein Tiefpaß überträgt sinusförmige Wechselspannungen geringer Frequenz unverändert. Bei hohen Frequenzen bewirkt er eine Abschwächung und Phasenverschiebung. Abbildung 5.4 zeigt für einen Tiefpaß den Verlauf von \(a_v\), der Spannungsverstärkung in decibel (dB) im Bode-Diagramm. In dem bei tiefen Frequenzen vorliegenden Durchlaßbereich ist \(a_v \approx 0 dB\); in dem bei hohen Frequenzen vorliegenden Sperrbereich erfolgt ein Abfall, der bei Tiefpaßnetzwerken aus konzentrierten Elementen durch eine Potenzfunktion gegeben ist. Gilt \(A_v \sim f^−m\), so spricht man von einem Tiefpaß m-ter Ordnung; im Bode-Diagramm entspricht dies einer Geraden der Steigung \(−m \cdot\) 20 dB/dec. Der Übergang zwischen Sperrbereich und Durchlaßbereich wird durch die Grenzfrequenz\(f_g\) des Tiefpasses markiert; bei dieser weist \(a_v\) in guter Näherung den Wert −3 dB auf.
Abbildung 5.4: Schematisches Bode-Diagramm
Übertragungsverhalten
Abbildung 5.5: RC-Tiefpass
Abbildung 5.5 zeigt die Schaltung eines RC-Tiefpasses. Wird am Eingang eine sinusförmige Wechselspannung \(v_1(t) = \operatorname{Re}(\underline{\hat{v_1}} e^{j\omega t})\) angelegt, so tritt am Ausgang die Spannung \(v_2(t) = \operatorname{Re}(\underline{\hat{v_2}} e^{j\omega t})\) auf. Der Spannungsübertragungsfaktor des unbelasteten Tiefpasses ergibt sich aus der komplexen Spannungsteilerformel
und \(\omega = 2 \pi f\) folgt aus #eq- für die Spannungsverstärkung
\[
A_v(f) = \frac{1}{\sqrt{1+(f/f_g)^2}}
\]
und für die Phasenverschiebung
\[
\varphi(f) = −\arctan(f/f_g).
\]
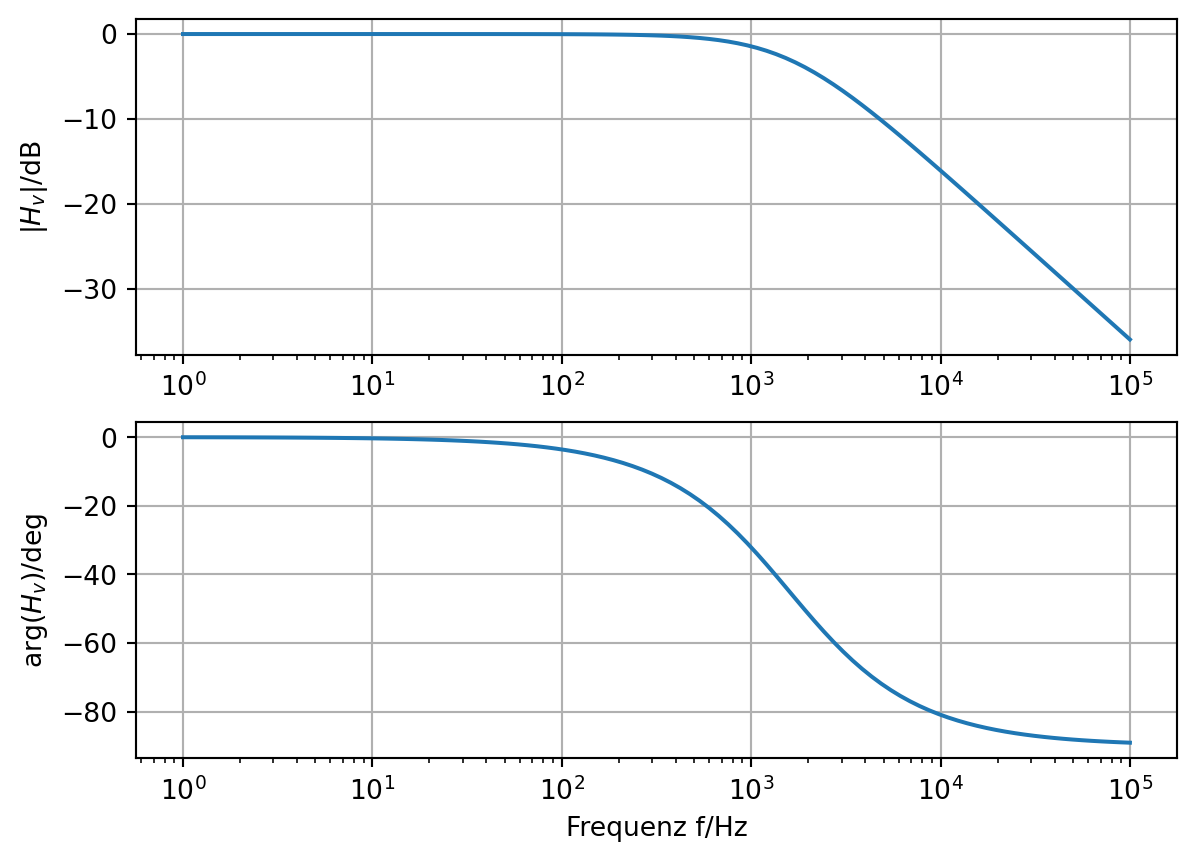
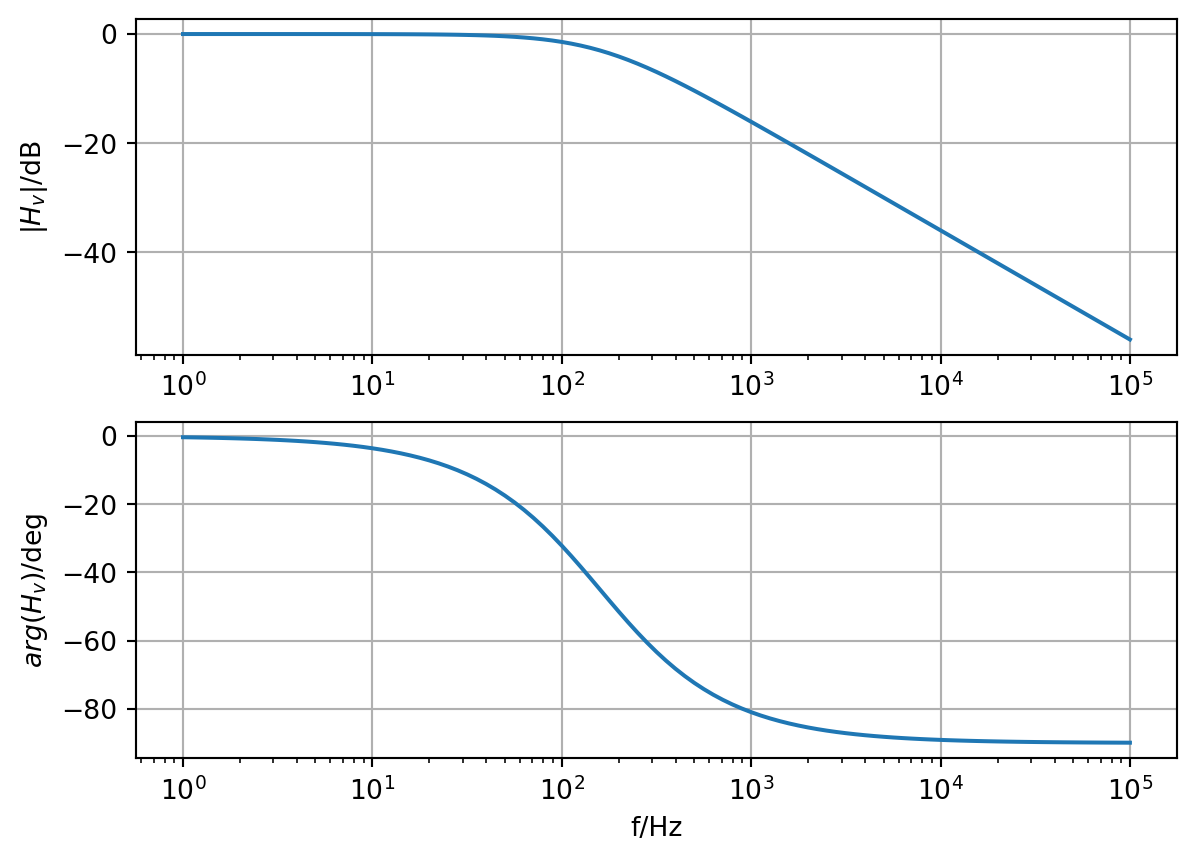
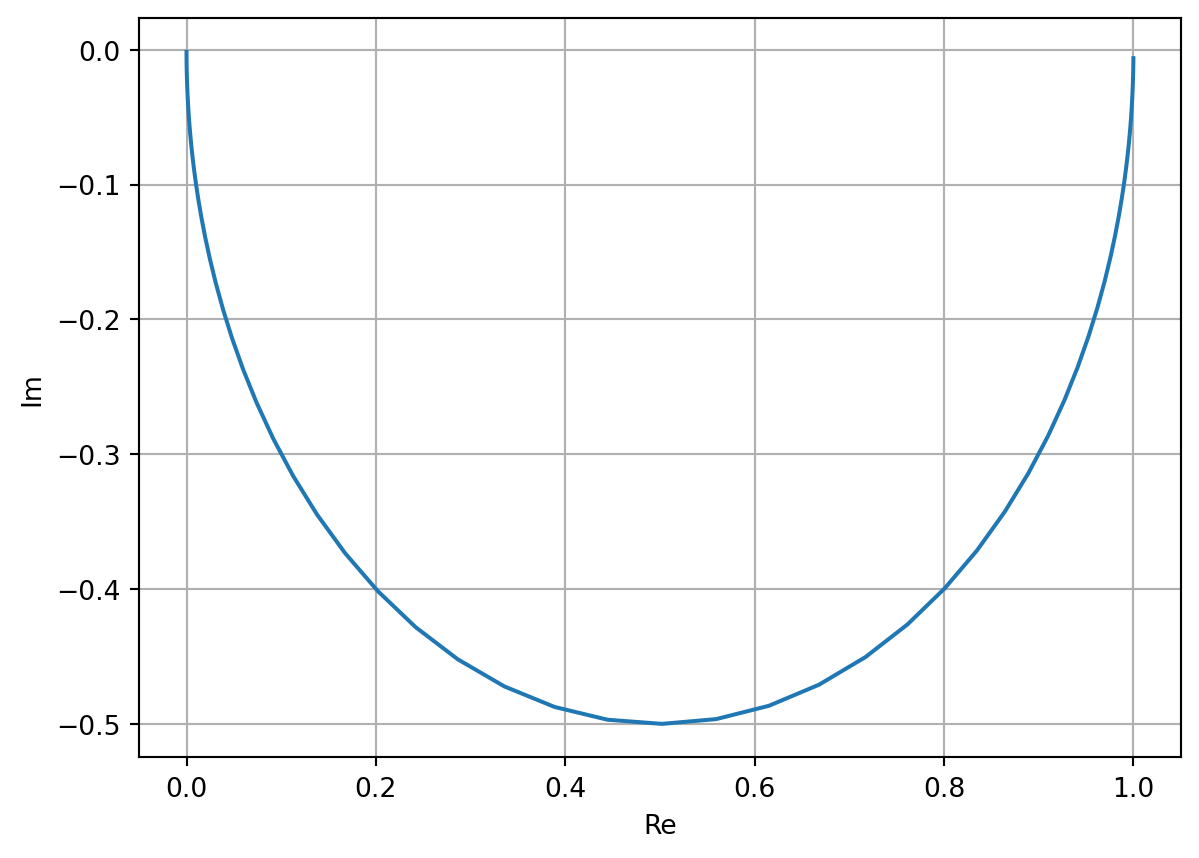
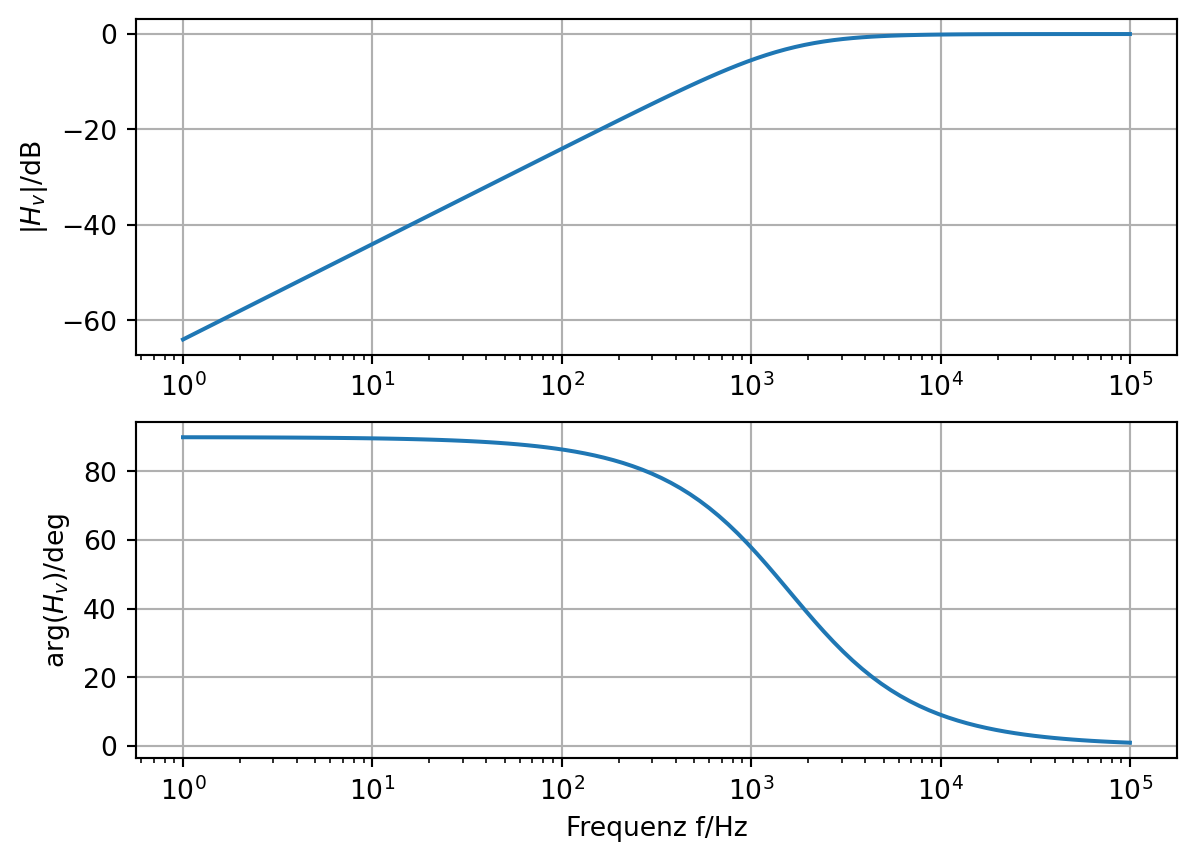
Das zugehörige Bode-Diagramm ist in Abbildung 5.6 zu sehen. Für Frequenzen \(f \ll f_g\) gilt in guter Näherung \(A_v \approx 1\) bzw. \(a_v = 0 dB\); für Frequenzen \(f \gg f_g\) dagegen \(A_v(f) \approx f_g/f\). Im Bode-Diagramm entspricht dies einem Abfall von 20 dB/dec, d.h. der betrachtete RC-Tiefpaß ist ein Tiefpaß erster Ordnung. Wird der für große Frequenzen beobachtete Kurvenverlauf im Bode-Diagramm linear zu 0 dB extrapoliert, so liefert der Schnittpunkt mit der 0 dB-Achse die Grenzfrequenz. Dort gilt \(A_v = 1/\sqrt{2}\) und \(a_v(f_g) = 20\,dB \cdot \log(1/\sqrt{2}) \approx -3.01 \,dB\), während die Phasenverschiebung den Wert −45\(^{\circ}\) aufweist.
Um in LTspice das Bode-Diagramm des RC-Tiefpasses zu erhalten, muss eine .ac Analyse durchgeführt werden. Diese kann mit Python wie folgt ausgewertet werden:
# -*- coding: utf-8 -*-"""Auswertung der AC SPICE Analyse der RC-Schaltung"""# %% Initimport ltspiceimport numpy as npimport matplotlib.pyplot as plt# %% Laden der RAW LTSpice Daten in den Python-Workspacefile='../files/spice/lec5rctp.raw'raw = ltspice.Ltspice(file)raw.parse()# %% AC Analyse# Daten werden als Numpy-Array geladen, Typ complexAf = raw.get_data("V(2)")freq = raw.get_data("frequency")a_dB =20*np.log10(np.abs(Af)) # Betrag in dBa_ph = np.rad2deg(np.angle(Af)) # Phase in Grad (engl. degree)f = freq.real# %% Erzeugen des Bode-Diagrammsplt.subplot(2, 1, 1)plt.semilogx(f, a_dB)plt.ylabel(r'$\vert H_v \vert$/dB')plt.grid()plt.subplot(2, 1, 2)plt.semilogx(f, a_ph)plt.ylabel(r'$arg(H_v)$/deg')plt.xlabel('f/Hz')plt.grid()plt.show()# %% Erzeugen der Ortskurveplt.plot(Af.real, Af.imag)plt.xlabel(r'Re')plt.ylabel(r'Im')plt.grid()plt.show()
5.6.1.1 Zeitbereich - Impulsverhalten
Für eine Untersuchung des Impulsverhaltens wird die Ausgangsspannung \(v_2(t)\) als Funktion von \(v_1(t)\) im Zeitbereich bestimmt. Im Fall des unbelasteten Tiefpasses ergibt der Knotensatz angewandt auf den Ausgangsknoten
\[
\frac{v_1(t) − v_2(t)}{R} = C \frac{d v_2(t)}{dt}
\]
Einschalt- und Ausschaltvorgang. Einfache Spezialfälle sind der Einschaltvorgang (\(v_2(0)=0\) und \(v_1(t) = V_+\) für \(t > 0\)) mit dem Ausgangsspannungsverlauf
Abbildung 5.7 zeigt für beide Situationen den Verlauf der Spannung an Eingang und Ausgang. Als charakteristische Zeit für das Erreichen des Endwerts dient die RC-Zeitkonstante\(\tau\); diese ist gleich der Verzögerungszeit\(t_d\) des RC-Tiefpasses. Erst für eine Zeitspanne \(t > 5\tau\) nach dem Umschaltvorgang ist der Endwert in guter Näherung (Fehler ca. 0.67 %) erreicht.
Anstiegs- und Abfallzeit. Als Anstiegszeit\(t_r\) wird oft die Zeit bezeichnet, die das Potential am Ausgang bei sprunghafter Änderung der Eingangsspannung benötigt, um von 10% auf 90% seines Endwerts anzusteigen. Aus folgt die Zeit \(t_{10\%}\), nach der die Ausgangsspannung 10% des Endwerts \(V_+\) erreicht hat
\[
t_{10\%} = −\tau \ln(0.9),
\]
sowie die Zeit \(t_{90\%}\) nach der \(v_2(t)\) 90% des Endwerts erreicht hat
\[
t_{90\%} = −\tau \ln(0.1).
\]
Die Anstiegszeit \(t_r = t_{90\%} − t_{10\%}\) errechnet sich hieraus zu
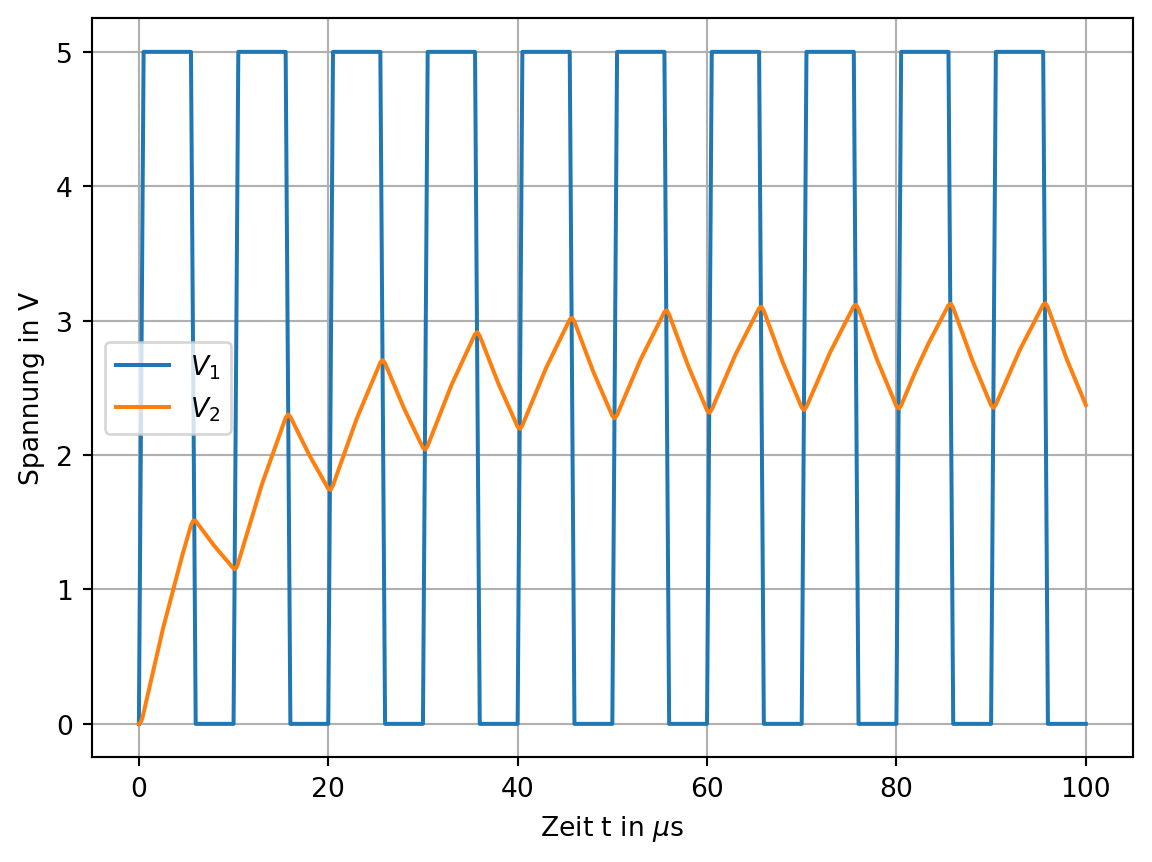
so stellt sich am Ausgang für \(t \gg \tau = 15\,\mu s\) ein periodischer Spannungsverlauf mit dem Gleichanteil 2.5 V und dem Wechselanteil \(\Delta v_2(t)\) ein.
Auswertung der LTspice Analyse mit Python:
# -*- coding: utf-8 -*-"""Auswertung der TRAN SPICE Analyse der RC-Schaltung"""# %% Initimport ltspiceimport matplotlib.pyplot as plt# %% Laden der RAW LTSpice Daten in den Python-Workspacefile='../files/spice/bsp133_reisch.raw'raw = ltspice.Ltspice(file)raw.parse()# %% TRAN Analyset = raw.get_time()*1e6# skaliertV2 = raw.get_data('V(2)')V1 = raw.get_data('V(1)')# %% Erzeugen des Plotsplt.plot(t, V1, label=r'$V_1$')plt.plot(t, V2, label=r'$V_2$')plt.xlabel(r'Zeit t in $\mu$s')plt.ylabel('Spannung in V')plt.grid()plt.legend()plt.show()
5.6.2 RC-Hochpaß
Ein Hochpaß überträgt sinusförmige Eingangsspannungen hoher Frequenz unverändert. Bei Eingangsspannungen tiefer Frequenz bewirkt er eine Abschwächung und eine Phasenvorauseilung. Abbildung Abbildung 5.9 zeigt schematisch den Verlauf von \(a_v\) im Bode-Diagramm für einen Hochpaß. In dem bei tiefen Frequenzen vorliegenden Sperrbereich erfolgt bei Hochpaßnetzwerken aus linearen Elementen ein Anstieg mit einem Vielfachen von 20 dB/dec entsprechend der Ordnung des Hochpasses: Ein Hochpaß der Ordnung \(k\) zeigt im Sperrbereich einen Anstieg mit \(k \cdot 20\,dB/dec\). In dem bei hohen Frequenzen vorliegenden Durchlaßbereich ist \(a_v \approx\) 0 dB. Der Übergang zwischen Durch laßbereich und Sperrbereich wird durch die Grenzfrequenz \(f_g\) des Hochpasses markiert, bei der \(a_v\) den Wert −3 dB aufweist.
Abbildung 5.8: RC-Hochpass
Abbildung 5.9: Schematisches Bode-Diagramm
Übertragungsfaktor
Für den in Abbildung 5.8 gezeigten RC-Hochpaß ergibt sich aus der Spannungsteilerformel
Für kleine Frequenzen kann in Gleichung 5.1 für \(A_v(f)\) die Frequenzabhängigkeit des Wurzelausdrucks vernachlässigt werden. \(A_v(f)\) steigt bei diesen Frequenzen in guter Näherung proportional zur Frequenz an
Im Bode-Diagramm (Abbildung 5.10) resultiert für \(f \ll f_g\) ein Anstieg mit 20 dB/dec, d.h. es liegt ein Hochpaß 1. Ordnung vor. für \(\omega \tau \gg 1\) bzw. \(f \gg f_g\) nähert sich \(A_v(f)\) dem Wert 1 (bzw. \(a_v \rightarrow 0\) dB); die Phasenverschiebung zwischen Eingangs- und Ausgangssignal, die bei kleinen Frequenzen 90\(^{\circ}\) beträgt, wird nun zu 0\(^{\circ}\). Bei der Grenzfrequenz gilt wie beim Tiefpaß \(A_v(f_g) = 1/\sqrt{2}\); die Phasenverschiebung zwischen Eingang und Ausgang ist hier jedoch 45\(^{\circ}\).
Die Analyse des Impulsverhaltens wird wie beim Tiefpaß im Zeitbereich durchgeführt. Der Knotensatz liefert (im unbelasteten Fall) für den Ausgangsknoten
Einschalt- und Ausschaltvorgang. Als einfache Spezialfälle werden der Einschaltvorgang und der Ausschaltvorgang betrachtet. Beim Einschaltvorgang springt $v_$1 bei \(t = 0\) vom Wert 0 auf den Wert \(V_+\). Da die Spannung über der Kapazität dabei erhalten bleibt (vC(0+) = vC(0−) = 0), folgt v2(0+) = V+. Wegen der für \(t > 0\) konstanten Eingangsspannung \(v_1(t)\), gilt \(v'1(t) = 0\) für alle Zeiten \(t > 0\). Aus diesem Grund verschwindet das Integral in (1.75) und der Ausgangsspannungsverlauf ergibt sich zu
Das Verhalten beim Ausschaltvorgang folgt auf analoge Weise. Hier war die Kapazität vor dem Sprung der Eingangsspannung auf die Spannung \(V_+\) aufgeladen, d.h. hier gilt direkt nach dem Umschalten v2(0+) = −V+. Aus Gleichung 5.2 folgt so der Ausgangsspannungsverlauf
Abbildung 5.11 zeigt für beide Situationen den Verlauf der Spannung an Eingang und Ausgang. Als charakteristische Zeit für das Erreichen des jeweiligen Endwerts dient auch hier \(\tau = RC\).
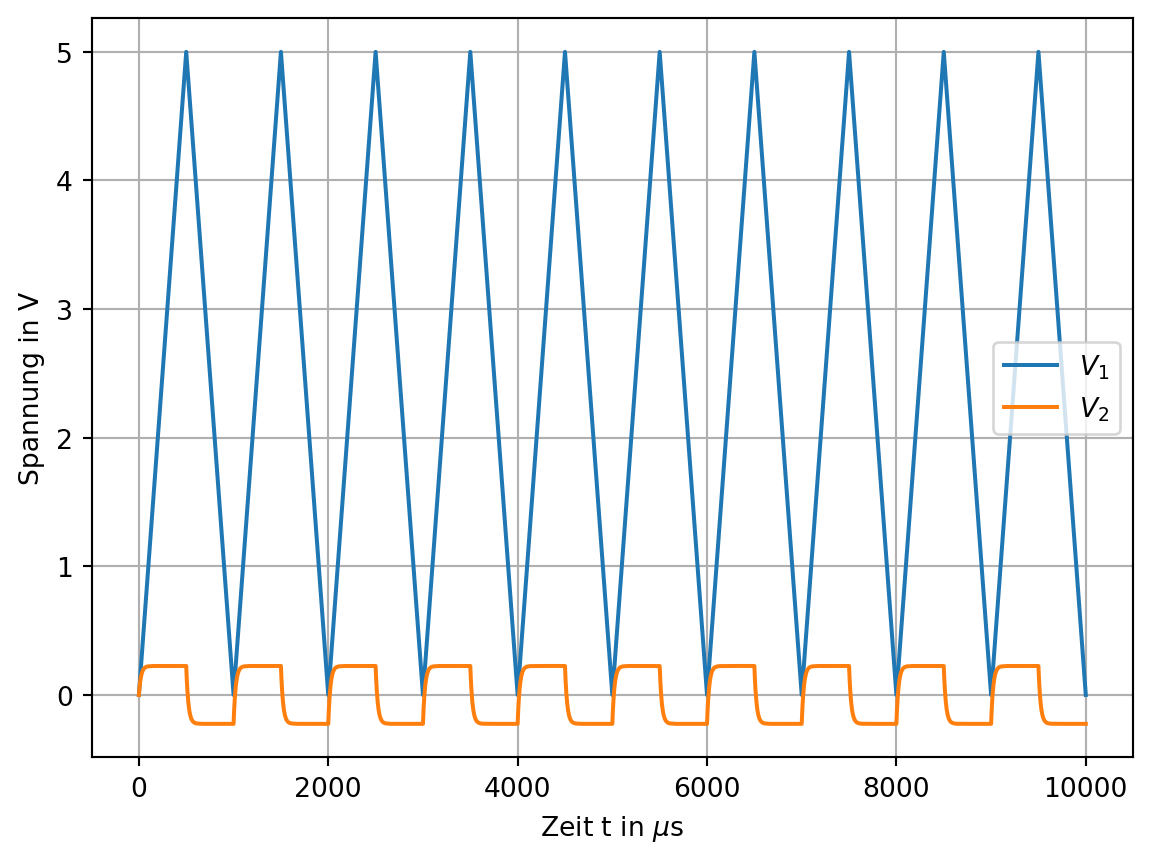
Beispielsweise wird mit LTspice auf den Eingang eines RC-Hochpasses mit \(R = 150\,\Omega\), \(C = 150\, nF\), \(f_g = 10.61\,kHz\) eine Dreiecksspannung gegeben, so ist bei steigender Flanke
Da die Frequenz der Eingangsspannung klein ist gegenüber der Grenzfrequenz des Hochpasses, wird am Ausgang eine symmetrische Rechteckspannung erwartet: Die Ableitung einer Geraden ergibt eine Konstante. Mit RC = 15 \(mu s\) folgt für die Ausgangsspannung
# -*- coding: utf-8 -*-"""Auswertung der TRAN SPICE Analyse des RC-Hochpasses"""# %% Initimport ltspiceimport matplotlib.pyplot as plt# %% Laden der RAW LTSpice Daten in den Python-Workspacefile='../files/spice/bsp134_reisch.raw'raw = ltspice.Ltspice(file)raw.parse()# %% TRAN Analyset = raw.get_time()*1e6# skaliertV2 = raw.get_data('V(2)')V1 = raw.get_data('V(1)')# %% Erzeugen des Plotsplt.plot(t, V1, label=r'$V_1$')plt.plot(t, V2, label=r'$V_2$')plt.xlabel(r'Zeit t in $\mu$s')plt.ylabel('Spannung in V')plt.grid()plt.legend()plt.show()
5.6.3 RC-Bandpaß
Abbildung 5.12: Bode-Diagramm eines Bandpasses
“Besitzt ein Netzwerk sowohl bei hohen als auch bei tiefen Frequenzen einen Sperrbereich und bei mittleren Frequenzen einen Durchlaßbereich, so liegt ein Bandpaß vor. Der prinzipielle Verlauf der Spannungsverstärkung \(a_v\) ist im Bode-Diagramm Abbildung 5.12 skizziert. Die Grenzen des Durchlaßbereichs werden nach unten durch die untere Grenzfrequenz \(f_{gu}\) und nach oben durch die obere Grenzfrequenz \(f_{go}\) bestimmt. Die Differenz \(B = f_{go} − f_{gu}\) heißt Bandbreite (engl. bandwidth) des Bandpasses; das geometrische Mittel
\[
f_m = \sqrt{f_{gu} f_{go}}
\]
der beiden Grenzfrequenzen wird als Bandmittenfrequenz bezeichnet. Bei logarithmisch unterteilter Frequenzskala liegt \(f_m\) genau in der Mitte zwischen \(f_{gu}\) und \(f_{go}\). Ein Bandpaß heißt schmalbandig, falls \(B \ll f_m\) gilt; als Maß gilt die relative Bandbreite \(B/f_m\). Die Abschwächung des Signals bei der Bandmittenfrequenz wird als Einfügungsdämpfung bezeichnet.” [2]
“Die als Wien-Glied bezeichnete Schaltung ist ein spezieller RC-Bandpass. Im Wien-Robinson-Generator bestimmt dieses Filter die Ausgangsfrequenz. Er generiert Sinusfrequenzen mit sehr geringem Klirrfaktor. Im durchstimmbaren Sinusgenerator sind die beiden Widerstände durch gemeinsam einstellbare Potentiometer ersetzt. Diese Anordnung gibt es auch in Wechselstrom-Brückenschaltungen.” [4]
“Brücken mit frequenzabhängigem Abgleich, wie die Wien-Robinson-Brücke in Abbildung 5.13, können als einfache Frequenzmessgeräte genutzt werden. Die Abgleichbedingungen der Wien-Robinson-Brücke lauten
Häufig wählt man \(R_2=R_3=R_4=R\), \(R_1=2R\) und \(C_3=C_4=C\). Damit ist Gleichung 5.3 automatisch erfüllt, während Gleichung 5.4 eine neue Abgleichbedingung ergibt, aus der die Frequenz \(\omega\) der Brückeneingangsspannung ermittelt werden kann
D. Mietke, „Elektroniktutor“, Oberstufenzentrum für Kommunikations-, Informations- und Medientechnik (OSZ-KIM), Berlin; online, techreport, 2024. Verfügbar unter: https://www.elektroniktutor.de
[5]
W.-E. Büttner, Grundlagen der Elektrotechnik 2. OLDENBOURGWISSENSCHAFTSVERLAG, 2014. doi: 10.1524/9783110371796.
[6]
R. Lerch, Elektrische Messtechnik: Analoge, digitale und computergestützte Verfahren. Springer Berlin Heidelberg, 2016. doi: 10.1007/978-3-662-46941-5.